








Publications and Resources
Since NASA’s beginning, the NASA History Office has prepared histories, chronologies, and oral history interviews and made them freely available to the public. Explore our trove of aerospace history resources!

The NASA History Series
The NASA History Series includes over 200 books and monographs on a wide range of topics from rockets and wind tunnels to the psychology and sociology of spaceflight. Many of these books are in e-book formats available to download at no cost.
Recent Additions to the NASA History Series
NASA's Discovery Program
In the newest release in NASA’s History Series, Susan M. Niebur draws on interviews with program managers, engineers, and scientists from the Discovery Program’s early missions to take an in-depth look at the management techniques they used to design creative and cost-effective spacecraft.

NACA to NASA to Now
Roger Launius's concise history of the NACA and NASA spanning the last century.
A History of Near-Earth Objects Research
Erik M. Conway, Donald K. Yeomans, and Meg Rosenburg explore how asteroids and comets have been seen through time, and how NASA's responsibility for planetary defense came to be.

The Wind and Beyond, Vol. III
Volume III of the series looks at the aerodynamics and development of airships, seaplanes, and rotary-wing aircraft
Selected NASA Publications of Historical Interest
This collection of special publications, technical memoranda, and reports represents a small fraction of the informative books and reports outside the NASA History Series that are of historical interest.
Additional Publications
NASA History News and Notes
NASA History’s quarterly newsletter explores major anniversaries from NASA’s past, the historical underpinnings of NASA’s current endeavors, and gives you the latest news in aerospace history research, publications, and upcoming meetings.
News and Notes
Spring 2024
What aspects of NASA’s predecessors are still with us today? The articles in this edition of News and Notes focus on the period from World War II to the establishment of NASA in 1958, looking at NASA’s underpinnings in the NACA, and the lasting impacts of the research, the people, and events of that era.
Winter 2023
The Winter 2023 issue looks at the history of NASA’s international partnerships to further science and exploration in space and here on Earth. Collaborations with the European Space Agency, Canada, India, Japan, Germany, and other nations are discussed.
Fall 2023
For the Fall 2023 edition, the spotlight is on the history of solar system exploration. Articles feature the MESSENGER, VIPER, Clementine, and the Mars Global Surveyor missions, as well as news from NASA's archival collections and a new oral history.
Summer 2023
The Summer 2023 edition focuses on NASA’s aeronautics research history and how lessons from the past still guide NASA’s work today. Topics include the ban on supersonic flight over land, the first Shuttle chase teams, the history of NASA's sustainable flight program, and more!
Spring 2023
Historians discuss the repercussions of the STS-107 tragedy and how it continues to shape NASA today. Reflections on other aerospace disasters and the safety and leadership lessons that were learned are also included.
Winter 2022
In celebration of the 50th anniversary of Apollo 17, articles include the orange soil at Shorty Crater, Engineering Support for the Apollo 17 mission at Johnson Space Center, the mission's science investigations, the crew's visits to Plum Brook Station and Langley Research Center, and more!
Fall 2022
Read about the Deep Space Network's role in the Apollo and Artemis Programs, contributions to the Artemis Program by Glenn and Langley Research Centers, the history of evidence for water on the Moon, plus a look at how Apollo 17 astronauts Ron Evans and Gene Cernan created keepsakes of their flight to the Moon for their families.
The Aeronautics and Space Report of the President
The annual “President’s Report” is a summary of the U.S. Government’s aerospace activities each year. Mandated by law, it contains information on aerospace activities conducted by 14 Federal departments and agencies, as well as appendices containing historical data on spacecraft launches and budget figures.
Recent President's Reports

Fiscal Years 2021 and 2022
Download PDF

Fiscal Year 2020
Download PDF
Fiscal Year 2019
Download PDF
Fiscal Year 2018
Download PDF
Fiscal Year 2017
Download PDF
Fiscal Year 2016
Download PDF
Oral Histories
NASA sees value in oral history because the process provides significant benefits and plays an important role in capturing and preserving the first-hand experiences of individuals, lessons learned, methodologies, and institutional memory. Oral history participants include managers, engineers, technicians, doctors, astronauts, and other employees of NASA and aerospace contractors who served in key roles in its programs. These oral history interviews ensure that the words of these pioneers live on to tell future generations about the excitement and lessons of space exploration.
Stories from the National Advisory Committee for Aeronautics (NACA)

Christopher C. Kraft, Jr.
When Chris Kraft was a young student fresh out of the Virginia Polytechnic Institute in Blacksburg, Virginia, he didn't know where he was going next. Having lived in Virginia all his life, he thought the local NACA laboratory was too close to home. He wanted a chance to go somewhere different. But the Langley Aeronautical Laboratory in Hampton offered him a position in the Flight Research Division, and a chance to train as an aeronautical engineer. Kraft never looked back and began his long and historic NASA career in 1945.
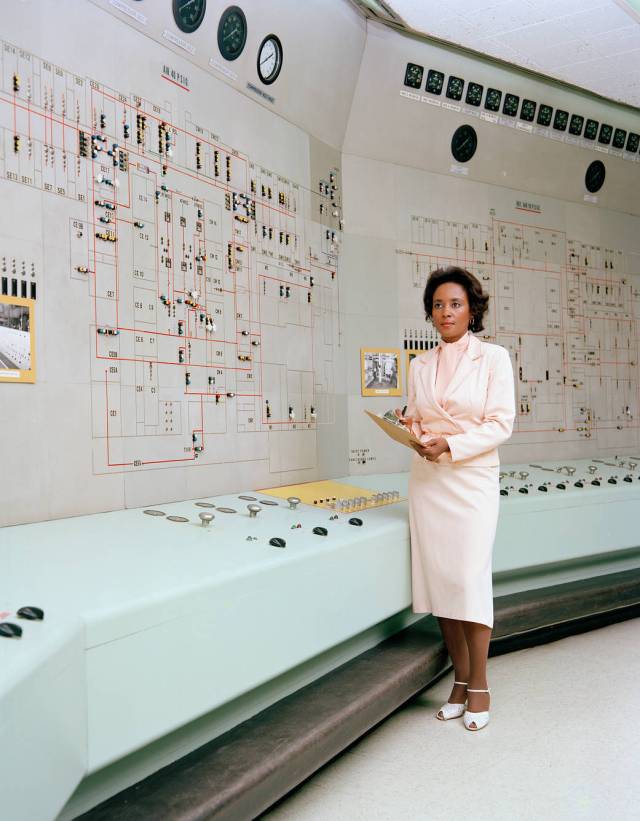
Annie J. Easley
Born in Birmingham, Alabama, Annie Easley's mother told her, "You can be anything you want to be, but you have to work at it." She later moved with her husband to Cleveland, Ohio, and in 1955 read a story in the newspaper that the NACA Lewis Flight Propulsion Laboratory was hiring "computers." She applied the next day and was hired two weeks later. Faced with the prejudices of the time period, she adopted an attitude of "If I can't work with you, I will work around you. I was not about to be so discouraged that I'd walk away."
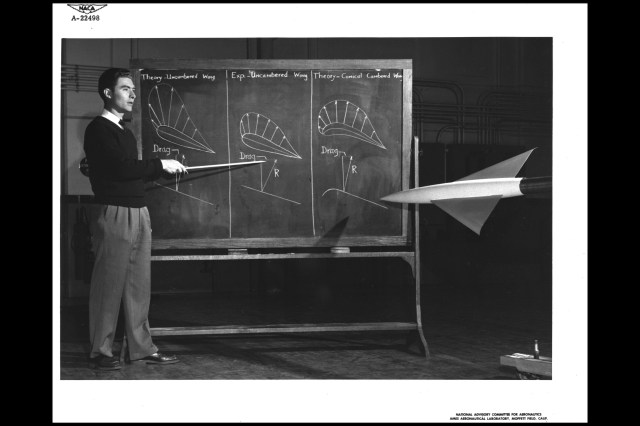
John W. "Jack" Boyd
Jack Boyd had always wanted to go to California, so when a friend told him the NACA was hiring at their laboratories, he chose the Ames Aeronautical Laboratory near Mountain View. Two weeks after sending in his application, he received a telegram telling him he was hired as an engineer. Because he had studied supersonic aerodynamics, his supervisor put him in a wind tunnel to devise airfoils and begin testing them at supersonic speeds. That simple choice of moving to California began a 73 year long career with NASA.

Betty S. Love
Betty Love began work at the NACA High Speed Flight Research Station in California as a "computer" in 1952. She later recalled, "Our office was like a library. Only the hum of the Friedan calculators was the noise that you heard. No one spoke. You weren’t supposed to visit with your neighbor. You were supposed to keep your work right in front of you and do that. You weren’t to go down and visit with the engineers." She attained an engineering position herself and retired in 1973, but Betty continued to support NASA by volunteering and preserving the Center's history.

Jo Dibella
After taking a Civil Service test, Jo Dibella received an offer for a temporary job with the Adjudications Section Social Security Board and moved to Washington, DC, in June, 1937. In early 1938, while working for the Census Bureau, she met someone at a local church concert who told her that the NACA was hiring secretaries. She landed that job and worked for Thomas Neill for 14 years. When Director Hugh Dryden needed a new secretary, she applied and won that position. Jo continued working with Dr. Dryden through the transition of NACA to NASA and until his death in 1965.

Milton A. Silveira
Milt Silveira graduated from the University of Vermont in 1951 on a Friday and started work the following Monday morning at the NACA Langley Aeronautical Laboratory. After serving in Korea as a helicopter pilot, he returned to Langley in 1955 and worked on helicopter loads and vibrations. “NACA was an organization that had some of the top people. Most of the time they were the experts in that particular field." Silveira joined the Space Task Group in 1961, moving to the Manned Spacecraft Center, and later retired as the Chief Engineer for NASA in 1986.
Other Research Resources
From Apollo mission menus to landmark space policy documents, these collections of resources will propel your research to new heights.
Aerospace History Research Resources

Apollo Flight Journal
The Apollo Flight Journal is a resource for those interested in the Apollo flights to the Moon and covers eleven human flights of the Apollo program, relating the parts of the missions not on the lunar surface.

Apollo Lunar Surface Journal
The Apollo Lunar Surface Journal is a record of the lunar surface operations conducted by the six pairs of astronauts who landed on the Moon from 1969 through 1972.

NASA Technical Reports Server
Search the NASA Technical Reports Server for reports and publications in the STI repository.
NASA Organizational Charts
Download NASA Headquarters organizational charts spanning 1958–2015.

Key Documents in Aerospace History Policy
From the birth of NASA with the National Aeronautics and Space Act of 1958 through recent Presidential Space Directives, review this collection of key documents directing U.S. space policy.
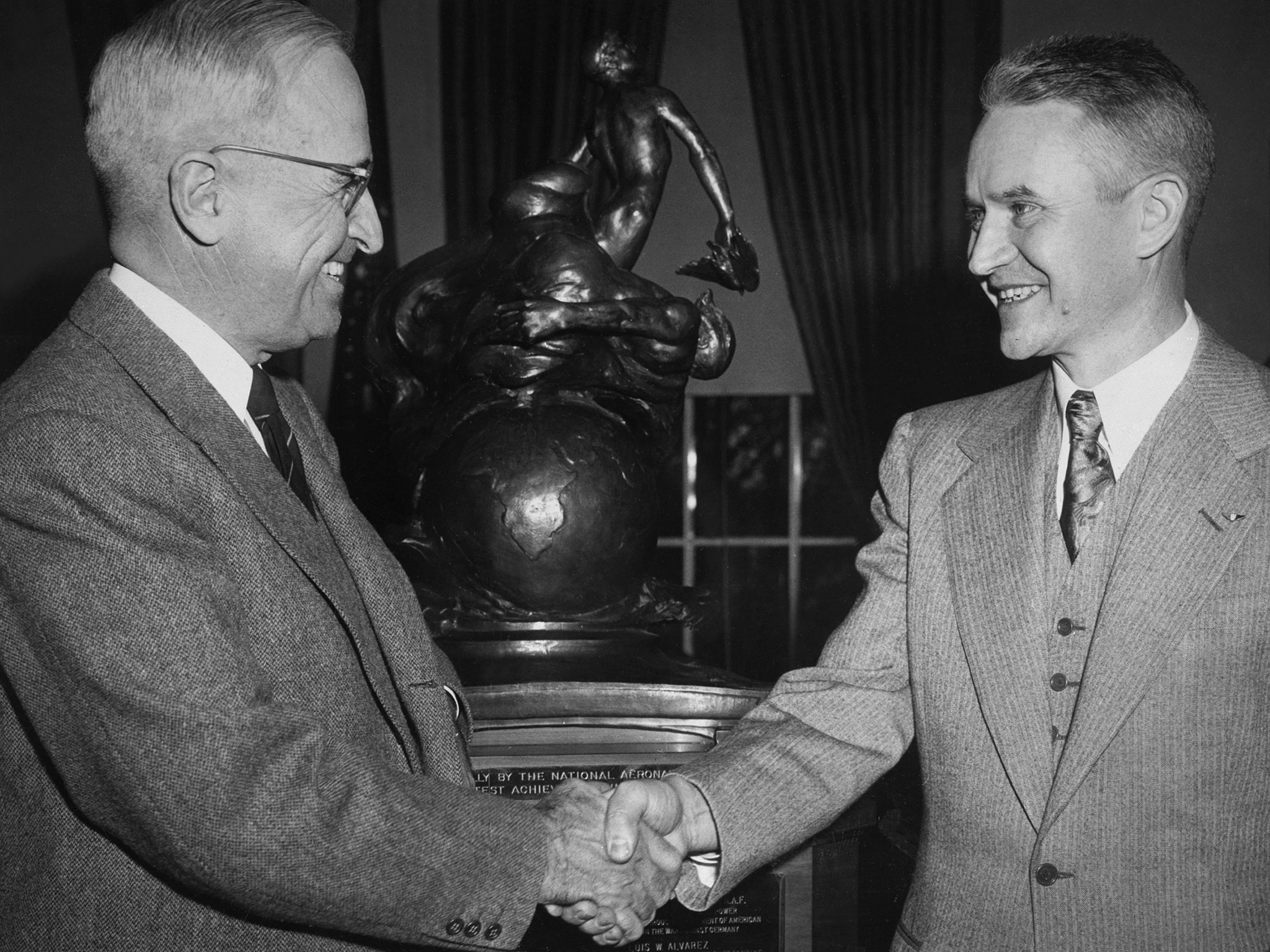
Collier Trophy Awards to NACA and NASA
The NACA and NASA have received the Robert J. Collier Trophy award several times for research and projects undertaken over the past century.