|
|
| Journal Home Page |
Guidelines for mission design came in large part from the experience with Gemini rendezvous techniques, which, in turn, drove the design and capabilities of the Lunar Module. Two plans evolved from the Gemini experience: the coelliptic and direct rendezvous methods. Both used similar underlying assumptions: There would be one "active" vehicle performing all of the maneuvering, and that it would be launched into a lower, catch-up orbit. At the proper time, the active vehicle would fire its engine to match the orbital plane of the target (if necessary) and then again to raise its orbit and intercept its passive target.
The most obvious solution, to ascend directly from the surface with one burn, and meet the passive vehicle shortly after launch, can be quickly rejected for several reasons. Most importantly, such an ascent requires that the launch be at precisely the specified time, and the engine, radar and guidance systems must perform absolutely perfectly (mere fantasies in the eyes of any engineer!). Anything other than such exactness and the ascending vehicle will miss its target. Even under ideal conditions, the all-important terminal phase (closing, braking and docking) would happen very quickly, and no control would be possible over the lighting conditions which could very well be total darkness. A final difficulty was the lack of easy solutions for recovering from any trajectory errors or systems failures during ascent. Vehicle attitudes, positions and procedures would vary widely, depending on the type of errors the crews were recovering from.
During development of the Gemini rendezvous plan, it became apparent that the key to success would be to standardize the terminal phase, and mandate specific vehicle relative positions, closure rates and lighting conditions. Such standardization would simplify the more critical maneuvers of the rendezvous and docking, greatly reducing crew training and workload in flight. Mathematical models, simulations and Gemini flight experiences determined that the optimal altitude difference between the two spacecraft would be 15 miles (with the active vehicle below), using a transfer angle (the angular distance the active vehicle would traverse during its rise to the higher orbit of the passive vehicle) of 130 degrees, and the lighting conditions should be such that the sun would be behind the active vehicle during the braking phase. From these parameters, mission planners were able to work backwards to design ascent trajectories and orbital parameters to accurately set up for the terminal phase.
First, the time required to make one orbit is determined by the altitude of the spacecraft. The higher the orbit, the longer it takes to complete one complete trip around the Earth (or Moon or whatever). This notion is used when a spacecraft needs to "catch up" with another; by lowering its orbit, a pursuer can reduce the angular distance between itself and its objective. At the same time, when a spacecraft is in an orbit ahead of its target, maneuvering into a higher orbit will "slow" the pursuing vehicle, allowing the target to catch up with it. Note that the vehicle in the lower orbit is moving further because of its faster velocity, not simply because it has a shorter distance to travel.
This need to change one's orbit leads us to the second important concept. The simplest and most efficient technique used for orbital maneuvering is called the Hohmann transfer. To raise the apogee of an orbit, thrust is applied along the direction of flight at a point 180° away from the desired new apogee. Reducing a point in the orbit is done in a similar fashion: Thrusting to reduce speed will reduce the altitude of the spacecraft 180° away from the point of the burn.
The third concept deals with another type of orbital change, when a spacecraft is orbiting in one plane (for example, inclined 28° relative to the equator, as is the case in many launches from Cape Kennedy) wishes to change to another (say, 51 degrees, which is standard for most Russian launches). The most efficient way to move a spacecraft from one orbital plane to another is to time the burn at the point where the planes of the two orbits intersect. But plane changes are very expensive in terms of the amount of energy that they require. Indeed, the energy needed to move a communications satellite from a inclination of 28°, in a low Earth orbit, to an geosynchronous orbit over the equator (35,880 km, 22,300 statute miles) is almost the amount required to send the it to the Moon! Clearly, plane changes are to be avoided if at all possible, especially in fuel critical vehicles such as the LM ascent stage.
Several maneuvers are required by the LM in order to perform a rendezvous with the Command Module. Rather than running the risk of attempting to make one burn of the ascent engine directly into a rendezvous orbit with the CM, this orbital ballet is composed of several steps, each of which progressively adjusts the various orbital parameters of the LM. The basic design of the rendezvous procedures is structured not only for energy efficiency (remembering that LM margins are very tight) but also to minimize the effects of small velocity errors. A small amount of over- or under-burn by the ascent engine, if uncorrected, could easily cause the spacecraft to miss one another by large distances. Two rendezvous methods were developed and used in Apollo. The first, coelliptic rendezvous, used the experiences gained in Gemini for Apollo's 9, 10, 11 and 12. Beginning with Apollo 14, and continuing through the end of Apollo, sufficient expertise was gained to use a variant known as direct rendezvous.
Both methods were designed to bring the LM to a specific point in space with the CSM ahead and above, with very tight constraints for their relative geometry and lighting. Arriving at this point at the proper time and velocity vector, where the all-important terminal phase begins, was the objective. The coelliptic method reflected the conservative nature of early mission design. Sacrificing a speedy return of the LM crew to the CSM, early Apollo missions required a methodical, one orbit, two-hour sequence of burns to set up for the terminal phase by matching the two spacecraft's altitude and orbital plane. From these missions, enough information was obtained on spacecraft performance and capability that two workload-intensive major maneuvers could be eliminated. Known as the direct method, the terminal phase now could begin shortly after ascent from the surface, with docking accomplished less than one orbit later. Because the direct rendezvous can be thought of as a highly optimized case of the coelliptic method, we will discuss the coelliptic method first.
While usually referred to as the "passive" vehicle, the workload onboard the CSM is anything but. Because of the need to be available to rescue the LM in the event of a failure of any of its systems, the CMP is constantly updating his own computer with the position and velocity of the LM. Such checks are also used as a "sanity check" of the solutions computed both on the ground and onboard the LM. Maintaining a circular, 60-nautical mile (110-kilometre) orbit during the rendezvous greatly simplifies the procedures, and places the CSM in an optimal position for any possible rescue maneuvers.
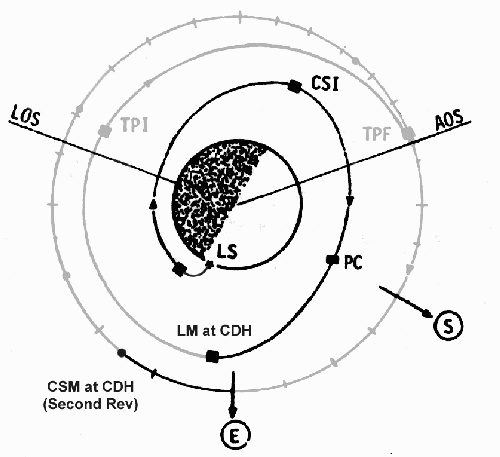
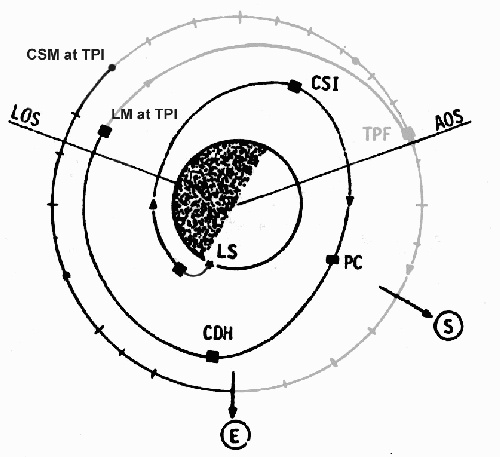
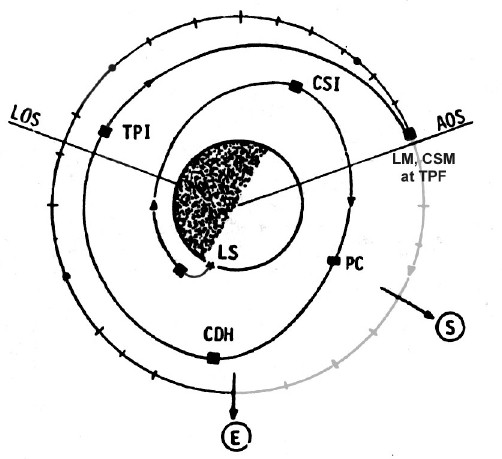
The following section contains the several steps and approximate start times involved in the coelliptic rendezvous. Note that a somewhat generalized version of the sequences are presented. Such a "composite" version is true to the overall mission design, but specific numbers (especially elapsed times and orbital parameters) varied somewhat between missions.
1:00 - Coelliptic Sequence Initiation (CSI), burn into 45-nautical mile (83-km) circular orbit.
1:30 - Plane change to match the CSM's orbital plane (if necessary).
2:00 - Constant Delta Height (CDH), burn to insert into an orbit with a constant 15-nautical mile (28-km) height differential with the CSM.
2:55, 3:10 - TPI midcourses (if necessary).
3:25: Terminal Phase Final (TPF), manual braking and docking.
Key to the flexibility of the various maneuvers was of course, the spacecraft computer. Each phase of the rendezvous had a separate computer program associated with it, which was started at the completion of the previous maneuver. Monitoring the computer, and inputting commands and data was a large part of the workload from lunar orbit insertion through terminal braking. Many of the entries appear to be rather mundane; distances, velocities, burn timings and the like, but they are tightly integrated into a larger picture of "where you are, and where you need to go". Providing distance information and angles relative to the CSM was the rendezvous radar. Capable of providing information directly to the computer or to the crew via tapemeter displays on the Commander's console, the radar was able to provide ranging data accurate to 0.1 nautical miles (0.18 km), and angular position, relative to the LM, of 0.01°.
Working together, the radar and computer were able to calculate to exact location of the CSM, and its relative position to the LM. The radar takes ranging marks about once per minute, and with each mark, also records the shaft and trunnion angles of the radar antenna to establish the direction to the CSM. This distance and relative angle data is passed to the computer, which takes the LM's position and velocity from the state vector, and using knowledge of the LM's attitude (when combined with the radar pointing angles, gives the true direction to the CSM), calculates the CSM's position. To obtain an accurate estimate of the CSM's state vector, several marks are required over a 5 to 15 minute interval, and this entire process is repeated several times to ensure that the data is consistently accurate.
While the LM's radar and computer are tightly integrated, it is entirely possible to perform the maneuvers with either system operating marginally or not at all. A true, "defense in depth" strategy was used to assure that a successful rendezvous could be accomplished despite various single-point failures. By using a collection of specialized charts and tables, the LM crew could plot their position and calculate the required burns by hand (remember, this was before the days of even hand held calculators!). Onboard the CSM, the Command Module Pilot was also taking distance and relative position marks of his own. Distance information to the LM was obtained from a VHF ranging system, where the LM broadcast a signal in the VHF frequency band that was received by the CSM's transponder. Angular data was obtained by locating the LM by its bright strobe light on the face of the vehicle, through the Command Module's sextant. With this distance and position of the LM, the CSM's computer could calculate the same position and burn information as the LM's computer could do with rendezvous radar data. Charts and tables similar to those on the LM were used in the CSM, to complement the CSM's computer. Finally, tracking data calculated on the ground was available to both spacecraft, and while not as accurate as the onboard spacecraft systems, was sufficient to guide the two vehicles together.
As a backup to the Primary Guidance and Navigation System (PGNS) computer, the LM also has an independent guidance and navigation system, called the Abort Guidance System. Composed of an independent set of gyros and accelerometers mounted to the body of the LM (collectively known as the Abort Sensor Assembly), and a small (4K words!) computer, the AGS has the capability to navigate the spacecraft through all of the maneuvers necessary for a successful rendezvous. Entries to the computer were performed by the LMP, who used the Data Entry and Display Assembly (DEDA), a combination of keypad and display similar to function as the DSKY. Vastly more limited in computational capability than the PGNS computer, and only able to display only a single line of information at a time, it was tedious to enter and retrieve data. Regardless, its programming was compact and elegant, and a novel interface was used to start various routines.
To calculate the parameters necessary for the rendezvous burns, the AGS took take data from the radar and incorporated it into its estimate of the CSM's position. Marks on the CSM were taken from the radar in the same manner as the PGNS system, and were taken at approximately the same time. Attitude and acceleration data from the ASA were used in computing the LM's state vector. By using similar computer algorithms, and identical radar data, the accuracy of the AGS was quite good, despite the limitations of the hardware.
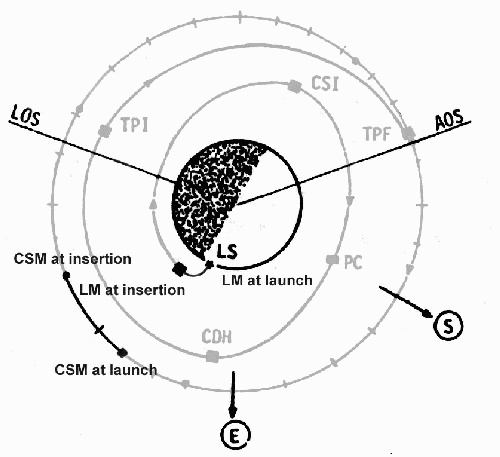
Relative positions of CSM and LM at launch and insertion.
Rendezvous radar tracking is normally done a number of times prior to ascent, when the CSM passes over the landing site. Not only does this verify the operation of the radar and the tracking software, it provides accurate position and velocity data of the Command Module in the event ground updates are not possible.
An alignment of the guidance platform is done, using the Moon's gravity as a vertical reference, and a star as its other reference. At the same time, the most up-to-date landing site location data is relayed to the LM's computer by the ground controllers. The Abort Guidance System is initialized, and loaded with the launch parameters. Next, Program 12, Powered Ascent, is started on the guidance computer. The crew provides values for the insertion velocity parameters, and verifies stored attitude parameters. 70 seconds before the launch, the CSM passes over the landing site. At five seconds before ignition, the Commander presses Abort Stage, which detonates explosive bolts holding the two stages together, and fires other charges to propel guillotines that sever wire bundles and plumbing that pass between the stages. At the same time, the Display and Keyboard (DSKY), which has been counting down, blanks and replaces its display with a flashing Verb 99, requesting that the crew authorize ignition. When the LMP presses Pro(ceed) on the keyboard, the normal display returns, and the engine ignites when the count reaches zero.
Ascent is often described as being "on a fast moving elevator", and is a surprisingly comfortable experience. At ignition, the ascent stage rises at about 3 meters/sec2 (about 10 feet/sec2), creating a accelerating force equal to about one-third of Earth's gravity, only twice that what the astronauts were experiencing standing in the cabin. Acceleration increases gradually until cut-off, when it will have built to about two-thirds that of normal Earth gravity. After the ascent stage reaches an altitude of only 50 feet (15 meters), it pitches about 54° face down to build horizontal velocity as it climbs. Such an abrupt maneuver may be a bit disconcerting to those used to seeing launches on Earth, where the vehicle rises essentially straight up, and pitches over only gradually. Such a difference is due to the lack of an atmosphere on the Moon. On Earth, atmospheric drag induces enough of a performance penalty that launch profiles are designed to rise above a large part of the sensible atmosphere before they can pitch over to an appreciable extent to gain horizontal velocity. Further, aerodynamic loads on a vehicle limit the amount of maneuvering possible, so that the best policy is to "keep the pointy end into the wind" during the early part of the boost phase. Ascending from the Moon has neither of these limitations, and the trajectory can be designed to be far more optimal.
During the 7½ minute ascent, the crew spends most of their time monitoring the trajectory, using displays on the DSKY (Nouns 94, 76 and 77), from which the crew can determine the altitude, velocity, downrange distance and time to engine cutoff. The guidance routines continually compare the desired trajectory with the actual values, and fire the RCS thrusters to adjust the attitude of the ascent stage to keep the spacecraft on target. Because the ascent engine is fixed and unable to gimbal, the only means to adjust the thrust vector is to change the attitude of the vehicle. Weight and balance, so critical on aircraft to ensure the center of gravity is within limits, are even more important on the LM's ascent stage. The spacecraft's center of gravity must be over the thrust line of the ascent engine within a small margin, otherwise the RCS system will have to work especially hard to keep the vehicle on course. In the end, the corrections for center-of-gravity and trajectory create a slow, back-and-forth, and up-and-down rocking of the vehicle as it guides itself to its insertion targets.
The stringent propellant management during ascent is particularly apparent here. As most of the rendezvous maneuvers are usually done in small, highly precise impulses, there is little need for the wallop the ascent engine can provide. Further, there is the concern that the given the low fuel state remaining in the ascent tanks, that a reliable engine start was possible at all. Propellants from the ascent engine tanks are used to partially replenish the RCS system during the last minute of the ascent. This crossfeed between tanks is begun about six minutes into the insertion burn, and is terminated shortly before shutdown.
Nearing the end of the ascent burn, attention turns to the accuracy the guidance system has taken them so far. Noun 85 is brought up on the DSKY, showing the remaining velocity to be gained. Despite receiving an on-time shutdown command, the LM's ascent engine (as with all engines) does not reach zero thrust instantaneously. The resulting tail-off, plus small attitude and guidance errors, leave the spacecraft with small velocity errors, which are displayed on the DSKY. Immediately after APS shutdown, the Commander uses the Thrust/Translational Hand Controller to command the RCS jets and refine the velocity.
Once the crew is in their desired orbit, several events happen in quick succession. Ground controllers update the LM computer with the latest values of the CSM's and LM's state vector. Next, the guidance platform is realigned to correct the minor misalignment brought on by the ascent burn. Once these tasks are completed, the LM begins its hunt for the CSM, using P20 (Rendezvous Navigation) to orient the rendezvous radar, point the face of the LM towards the CSM (so that its flashing beacon can be seen by the CMP though the sextant) and to begin taking marks on the angular position and range of the CSM. The rendezvous radar sends range and angular position information to the LM computer about once per minute, and the computer then uses this information to compute the relative positions and velocities of the two spacecraft. At least five marks are needed to generate accurate position information, and the process of taking a series of marks are repeated several times to get fresh solutions. At the same time radar data is being accepted by the AGS so that it can develop an independent estimate of the CSM's position.
The LM crew starts P32 for the Coelliptic Sequence Initiation (CSI) calculations and enters 410+00000 on the DEDA to start similar calculations on the AGS. The CSI is a 45 second RCS burn which will raise the pericynthion and result in a 45-nautical mile (83-kilometre) circular orbit. The target values for the burn, specifically the timing of the burn and its velocity changes are determined from the CSM's state vector determined from the rendezvous radar data. The LM crew checks to see if there are any "out-of-plane" corrections that need to be made to match the LM's and CSM's orbital planes. A very small plane change can be made as part of the CSI burn, but a larger one (more than a few feet per second) will have to wait until the scheduled plane change burn can be performed.
All the while the LM is running P32, the CSM is running it's own P32 (CSM Coelliptic Sequence Initiation), using the data from marks on the LM and ground updates. If the need arose where the LM was unable to perform any of it's maneuvers, the CSM would assume the active role and perform the maneuvers itself. Additionally, the full suite of LM rendezvous programs are available on the CSM, first to provide "sanity checking" of the LM and ground solutions, but also to provide the capability to act as a backup to the LM should its computer fail. About 1 hour after the LM's insertion, its crew performs the CSI burn to bring the ascent stage into an approximately 45-nautical mile (83-km) circular orbit. If the CSM is in a lower orbit, this burn will target the ascent stage for an orbit 15 nautical miles (28 kilometres) below the CSM. To aid the CSM's tracking of the LM, the CMP runs program P76, LM Target Delta V. As input, the CMP gives P76 the key parameters of the LM's burn; the time of ignition and the expected velocity components in all three axis. As the prescribed time, the CSM's computer assumes that the burn was performed, and updates its estimate of the LM's state vector. Such information is necessary if the computer is to maintain an attitude where the transponder is pointed at the LM's rendezvous radar antenna, and so that the sextant can be driven to where the LM should appear in its field of view.
Immediately after the CSI burn, program P20 is started again to track the CSM and collect new rendezvous solutions. Twice, several marks are taken, solutions computed, recorded and plotted on specialized charts, while the CMP continues sextant sightings and VHF ranging. Another check is performed by the LM crew to see if there is a large out-of-plane component to the LM's orbit that would be corrected by a plane change burn. As the LM is now approaching the point where the two orbital planes intersect, the crew must decide wither the out-of-plane component is sufficiently large to justify a special burn, or if the error can be eliminated during subsequent maneuvering. As a rule of thumb, if there is less than a 5 feet per second plane change requirement, later maneuvers can be used to match the two orbital planes. In almost all cases, there is a small amount of out-of-plane maneuvering performed during most of the maneuvers, so there are no special procedures or additional workload involved.
Near the time for the plane change burn, the LM emerges from behind the dark side of the Moon, and is still below and behind the CSM. Once in the sunlight, the tracking beacon is turned off, as the light would be washed out against the lunar surface below. Q: can the CSM see the LM now?
1:30 - Plane change to match the CSM's orbital plane (if necessary). Done with RCS, the burn time is dependent on the amount of correction to be applied, and the exact time of ignition is computed to be when the LM crosses the orbital plane of the CSM. Nominally, this burn is not performed, as the out-of-plane errors after ascent and CSI were reasonably small.
Three more sets of rendezvous solutions are made by both the CSM, using the VHF ranging system and sighting the LM through the sextant, and LM with the rendezvous radar. The ground also has been computing its own solution in the Real-Time Computing Complex. All these are evaluated to determine the best values for the CDH burn. Generally, the measure of the "best" value is the accuracy of the data source (the LM PGNS is generally more accurate than the AGS, and any source is better than the backup charts), and the consistency of the solutions. Ideally, each of the several sets of marks taken on the other vehicle should arrive at similar solutions for the upcoming burn. If a set of solutions for the next maneuver do not settle into a narrow range of values, or disagree significantly with the solutions from other sources, they are disregarded. Evaluation of the quality of the rendezvous solutions continues until the spacecraft are station-keeping, and are ready to dock.
After a series of marks have been taken on the CSM, the LM crew starts Program 33, Constant Delta H(eight) (CDH), which computes burn parameters for the LM to maintain a constant 15-nautical mile (28-km) altitude difference below the CSM. An entry of 410+10000 on the DEDA starts CDH computations on the AGS. Based on the rendezvous marks taken so far, P33 computes a time for CDH ignition, the number of range and position marks to the CSM taken for the current set of rendezvous solutions. The crew can monitor the change in the CDH velocity estimates that result from the once-per-minute updates of the CSM's position. The AGS is also receiving updates from the radar, and from the marks taken, is computing its own solution of the CSM's orbit.
During the last few maneuvers, the capabilities of the computer come to light. In virtually all discussions of the computer, it is common practice to state that the "computer is now running Program X", or "the crew is now starting Program Y", creating the impression that the computer can run only one major program at a time. Generally this is correct, and the invocation of one program automatically terminates the currently running one. There is an exception to this situation, which is the case where the Rendezvous Navigation program, P20 (and two other related programs, P22 and P25), are running. If another program is running, starting P20 will cause it to terminate, and P20 will begin running in the previous program's place. However, while P20 is active (as it is during virtually all of the rendezvous maneuvers), it will remain running "in the background" when the various targeting and maneuvering programs (such as P33 here) are started. This provides the crew with continuous range and position updates on the CSM, allowing the targeting programs to continually refine their calculations.
Knowledge of both the CSM's and LM's state vectors (position and velocity) are essential, as the goal is to maneuver the LM so that it is a constant 15 nautical miles (28 kilometres) below the CSM. So, if the CSM is in a circular, 60-nautical mile (110-km) orbit, there would be very little for the LM, in an 45-nautical mile (83-km) circular orbit, to do. But, the CSM's orbit is usually a bit elliptical, due to the effects of mascons perturbing the orbit and the fact that the Moon, like the Earth, is not perfectly spherical. So, the LM may have to maneuver to a 44.1 by 43.3-mile orbit, if the CSM's parameters are 59.1 by 58.3-miles. The timing of the burn is also modified so that the lines of apisides (the line between the apogee and perigee) of the two spacecraft's orbits are matched. Normally, this is a very small burn of only a few seconds using the RCS thrusters, as the orbital parameters are not changed significantly.
Now the CSM computer is running P33 (LM Constant Delta Height) as a backup, providing another set of solutions for the CSM if they are needed. Once the LM burn parameters are agreed upon, the CMP starts P76 (LM Target Delta-V) again, and enters the LM's time of ignition and expected velocity changes.
Tracking of the CSM using P20 is started again, and the Terminal Phase Initiation program (P34) is started to compute the parameters needed for the maneuver. On the AGS, a 410+30000 entry is made to start its own TPI routines. The timing of the burn and its velocity changes are carefully planned, as the goal is to ensure that a standard approach is performed. From the Gemini experience, this maneuver starts with the CSM about 26° above the LM's local horizontal plane, and the LM will travel 130° around the Moon before it meets with the CSM. The geometry of this allows the LM rise to the CSM's orbit from below and behind, only to slip ahead of the CSM when their altitudes match.
Terminal Phase Initiation, as its name implies, is the last of the series of maneuvers, designed to raise the pericynthion to slightly higher than that of the CM's. This burn, performed out of communications with Earth, is very similar to the Hohmann Transfer. Losing in the tradeoff for efficiency is the tolerance for any errors in the amount of velocity required, and in the estimates for the spacecraft's position. To manage these potential errors, the TPI burn intentionally raises the LM's apocynthion higher than that of the CSM. This reduces the efficiency of the maneuver somewhat, but it ensures that the LM will not undershoot its target, and that the relative geometry between the two vehicles will be standardized. Errors that remain in the trajectory after the maneuver will be eliminated during two planned midcourse corrections.
About 2 hours and 40 minutes after insertion, the TPI burn is performed. Using the RCS thrusters, the LM increases its velocity about 25 feet per second (7.6 m/s). Timing is critical, for every second of error in the ignition time, the spacecraft will be over a mile apart when their altitudes match.
After the TPI burn is completed, attention in the LM turns to the midcourse corrections to precisely match its trajectory with that of the CSM. While the TPI burn may have been right on time, and the required velocity change accurate within a few tenths of a foot per second, there are still enough errors in the trajectory for the spacecraft to miss by large fractions of a mile. As the LM arcs towards the CSM, the smaller distances and slower relative speeds allow highly accurate measurements of range and velocity. Program P20 is restarted, and new marks on the CSM are started. Program P35 (Terminal Phase Midcourse) is also begun, which will provide information on the small velocity adjustments needed to fine-tune their approach.
In the 45 minutes between the TPI and TPF burns, two midcourse corrections are available if needed. A sequence of Program 20 (running in the background) and Program 35 (Terminal Phase Midcourse) are used for determining the parameters for the midcourse maneuvers. Usually these are small but essential maneuvers and generally amount to only a few feet per second each. The first midcourse correction is performed at about 15 minutes after TPI, with the second one about 15 minutes later. The CSM is in visual contact during this entire phase and is also taking its own marks on the LM. Like the previous maneuvers, the CSM computes a contingency Terminal Phase Midcourse program (P35), and will use P76 to incorporate the LM's maneuvers into its computer. Time is in short supply during this final phase, and the crew in the LM is very busy setting up for the midcourse corrections. The rendezvous radar provides very accurate ranging data from this point on. As the spacecraft are in essentially identical orbits, there is no longer any need for the CMP to take marks using the VHF ranging and sextant system. Distance, rate and angular offset information from the VHF ranging system are displayed directly on the DSKY as the CMP makes his final approach for docking. At this point, the two spacecraft are on their own, as the rendezvous radar and VHF ranging system provide far more accurate and timely data than the ground could provide.
Terminal Phase Final is a series of small braking burns, begun about 1¼ nautical miles (just over 2 km) from the CM, and completes when only a few hundred feet separate the two spacecraft. Using data from the rendezvous radar, the Commander can monitor the closing rates and by adjusting the braking burns, perfectly match the LM's orbit with the Command Module. A series of 4 burns are made, each with a goal of a specific amount of velocity reduction. Program 47 (Thrust Monitoring) is selected to monitor the velocity changes resulting from the braking maneuvers, and also to display the range and range-rate to the CSM. In these last few minutes of the approach, the LM Commander manually slows the spacecraft by 30, 20, 10 and 5 feet per second at distances of 6,000, 3,000, 1,500 and 600 feet respectively, using the two forward-facing RCS thrusters. By the end of these braking maneuvers, the LM has parked itself just slightly ahead of the CSM. During this last phase of the rendezvous, the CMP has selected P79 (Final Rendezvous) to align the CSM with the LM ascent stage for docking. Once this maneuver has completed, the program provides the range, range-rate and angular difference between the CSM's X-axis and the LM.
By the time the final braking is done, the two spacecraft are in identical orbits, and the docking can proceed at an unhurried pace. Several minutes of "station keeping", or orbital formation flying, are performed to allow the crews to photograph each others spacecraft. Turning its "face" away for the first time since the beginning of the rendezvous, the LM pitches down to present its docking target and drogue to the CSM. The CMP, with the advantage of better visibility, now takes the active role for docking. Thrusting forward initially at little more than a foot per second, and eventually closing at a fraction of that, the CMP uses the COAS (Crewman Optical Alignment Sight) to align the CSM with the docking target on the top left structure of the LM.
Upon initial contact of the CSM's docking probe into the LM's drogue, small fingernail-sized, capture latches at the tip of probe engage the small end of the conical drogue, and pneumatic shock absorbers in the probe structure dampen the motions of the two spacecraft. Talkback indicators on the CMP's panel indicate that the LM has been captured, and that a "soft dock" has been achieved. The probe is retracted by a switch, and when it has pulled the LM into contact with the Command Module, twelve docking latches securely grab the LM for a "hard docking".
0:00 - Launch from the lunar surface and insertion into 9 by 45-nautical mile (17 by 83-kilometre) orbit.
0:40 - Terminal Phase Initiation (TPI), burn to intercept CSM's orbit.
0:55, 1:10 - TPI midcourses (if necessary).
1:25: Terminal Phase Final (TPF), manual braking and docking.
To assure that a rendezvous could be made on the first orbit, three important capabilities needed to be demonstrated. First and most importantly, the engine and guidance system had to be sufficiently accurate to perform the insertion and TPI burns with great precision. Next, the ability for both the CSM and LM tracking systems (the rendezvous radar on the LM, and the sextant plus VHF ranging on the CSM) were adequate for the task. Finally, crew procedures had to be streamlined to perform all the necessary tasks in the foreshortened time available.
These capabilities were demonstrated over four earlier flights. In all cases, the systems performed as expected or better, and their capabilities were tested and proven in situations that were not entirely nominal: Apollo 11 had the difficulty in establishing an accurate fix on their landing site, Apollo 12's ascent stage burned the spacecraft into a slightly higher orbit than planned, and the CSM's orbit on Apollo 15 was much more elliptical than planned. All these variants had been anticipated, and the systems were designed to compensate for a certain level of error.
New programming in the Command Module's computer served to reduce the workload of the CMP during the busier times of the rendezvous. Known as the MINKEY (MINimum KEYstroke) routine, it automatically sequenced the CMP through the several rendezvous programs, routines and displays (P32 -> P35, plus P76 and P79) that normally required a manual series of keystrokes to enter. Crews praised the MINKEY controller in its ability to reduce the workload on a very busy CMP.
Direct rendezvous begins the same as the coelliptic method, with pre-ascent updates sent to the LM by the ground, an alignment of the guidance platform, and tracking the CSM during one of its passes over the landing site. As crews stayed longer on the surface, the Moon's slow rotation moved the landing site away from the CSM's orbital plane, and beyond the capabilities of the LM to change orbital planes. Hence, the task of changing planes was left to the CSM to perform, usually the day before the scheduled ascent from the Moon. The timing and parameters of this plane change were such that the CSM and LM would be essentially in the same plane at the nominal liftoff time, reducing the propellant demands and workload on an already packed schedule.
Liftoff and orbital insertion are the same as the coelliptic method, and the LM is placed in a 9 x 45 nautical mile (17 x 83-km) orbit. A quick evaluation of the orbit is done immediately after shutdown. If necessary, a small, "tweak" burn to fine tune the trajectory may be done. This "tweaking" of the orbit is conducted only a few minutes after insertion, maximizing the remaining time for tracking the CSM.
If the orbital parameters were significantly off, or if there was a failure of one of the LM's guidance and navigation systems, a "bail-out" maneuver might be recommended. A bail-out burn would place the LM into an orbit higher than that of the CSM. The CSM, now in the lower, faster orbit, is now in position to become the active vehicle in the rendezvous. The rendezvous maneuvers after a bail-out burn are more complex than during a standard rendezvous, and are discussed in the "aborts" section.
Assuming that the LM is in good health, and the trajectory properly adjusted, the crew begins program P20 (Rendezvous Navigation) on the computer to track the CSM. At the same time, the CSM is tracking the LM using its VHF ranging and sextant, and computing its own solutions to the TPI maneuver. Only about half an hour of tracking is available between insertion and the time when attention must turn to TPI preparations, so the crews in the LM, CSM and on the ground all work to compare TPI solutions. The best solution is usually that which is stable and doesn't change over time, and agrees favorably with the other sources. The LM rendezvous radar and computer are generally the most accurate sources of targeting solutions, so the bias is to use the LM solution unless it differs significantly from the CSM and the ground.
Because of the larger velocity change, the ascent engine is used for the burn, instead of the RCS thrusters. Velocity changes for the TPI burn are somewhat larger than for a coelliptic rendezvous, due to the fact that the LM is in a lower, elliptical orbit (as opposed to a 45-nautical mile circular orbit). Despite the differences, the intended effect of the maneuver is the same. After TPI, the LM is on the familiar transfer orbit to meet with the CSM 40 minutes later. The benefits of a standardized terminal phase are clearly apparent, as the two midcourse corrections, final braking and docking are the same as discussed in the coelliptic technique.
So far, we have discussed the maneuvers involved with an orderly ascent from the surface, extensively planned and precisely executed. But what happens if it's a "bad day at work"? Problems during descent that are serious enough to require aborting a landing can leave the LM being in a wide variety of possible orbits, each which might have its own rendezvous solution. To whittle down this broad topic, we'll only touch upon aborts from a lunar descent.
A wide variety of failures could require a landing to be cancelled, ranging from a systems failure in a critical component (consider Apollo's 11, 14 and 16, each of which could have issues that may have required an abort) to simply running out of fuel without an adequate place to land.
Optimally, the crew would like to abort with the ascent and descent stages still attached. The fuel, oxygen, power and cooling water available in the descent stage would greatly extend the lifetime of the spacecraft and provide time and maneuvering capability for a greater range of options. An abort using the unstaged LM was possible prior to, and only a few minutes into the powered descent. After that point, there would be insufficient fuel in the descent stage to bring the entire LM back into the proper orbit, requiring that the crew shed its dead weight and rely on the ascent stage. Such scenarios are hardly the far-fetched dreams of a malevolent simulation supervisor. During the prelanding checks on Apollo 14, an errant solder ball in the Abort pushbutton was intermittently triggering the abort discrete in the computer. If the solder ball connected early in the descent burn, the abort program would have been automatically selected to abort using the descent stage. Problems late in the descent, such as when Apollo 11's computer overloaded, or when Apollo 14's landing radar refused to lock on, would have forced using the ascent stage as the only option to return to orbit.
Normally, aborts in the LM are initiated using the Primary Guidance and Navigation System (PGNS) computer, either by pressing the Abort/Abort Stage button on the Commander's main display console, which automatically interrupts the currently running program with one of two abort programs. Pressing the Abort button while the descent stage is still attached causes the spacecraft to pitch forward, throttle the descent engine up to full thrust, and the PGNS guides the LM to orbit. If situations demand an abort late in the descent, with fuel, velocity and altitude low, pressing the Abort Stage button will shut down the descent engine, fire the pyros to separate the two stages, and fire the ascent engine to achieve orbit. Aborts can also be initiated through directly entering the abort program number through the DSKY (Program 71 for aborts using the DPS, Program 72 for APS aborts), but given the likely time pressures of the situation, simply hitting the abort button is generally the easiest means of recovering from a bad situation.
Despite its name, control is not passed to the Abort Guidance System (AGS) during an abort. If the PGNS is still operating properly, it will handle all of the chores necessary for orbit insertion. The only time that the AGS is in control of the guidance and navigation of the LM is if a PGNS component failed. Such a failure, due either to hardware or software may manifest itself through inconsistent displays, an alert by the Caution and Warning System, or detection of erroneous data by the ground controllers. By simply flipping the Guidance Control switch, control of the LM is taken away from the PGNS, and places the AGS in control.
Far less capable than the PGNS, with specifications so meager that the at first glance they seem to be a typographical error, the AGS nonetheless was capable of placing the LM into orbit, and calculate all the necessary maneuvers for rendezvous, plus maintain control of the spacecraft attitude. All with only 4,096 words (! - not kilobytes, nor megabytes and certainly not gigabytes - just 4,096, 15-bit words) of memory, and a processor that was several times slower than a 1970's era Apple II computer. A real tribute to its designers.
Because during the descent, the LM is slowing down and the CSM is moving ahead, any abort and subsequent rendezvous is complicated by the fact that the two spacecraft are now significantly out of position for a either of the rendezvous solutions described above. Because the CSM is so far ahead, the best solution is to let it continue around and catch of from behind. To do this, the traditional roles are reversed, and the LM boots itself into a higher, 115 x 45-nautical mile orbit. With the LM in the slower orbit, the CSM "catches up" from below after two revolutions. Once the proper phasing angles are restored, the LM lowers its orbit to circular, 45-nautical mile orbit. Here, the beauty and simple elegance of the rendezvous design becomes apparent. Even after a very bad day, with an abort resulting with the two spacecraft in very different orbits, we have recovered to the point where we can use the standard coelliptic rendezvous technique. Lets look at this maneuver in more detail.
For this example, we will assume the latter part of the lunar descent has turned into a can of worms. During an otherwise nominal descent, the crew is faced with a critical situation: a cabin leak, electrical or cooling system failure, or a problem with the descent engine. To simplify this further, we'll also assume that the guidance platform and computer are OK, and we'll be aborting using the primary systems (procedures for using the AGS are very similar, but more complex, if not terribly arcane).
Several maneuvers are necessary to perform an abort rendezvous, and there are a variety of possibilities depending on the point of time of the abort. However, these can be generally summed up as:
0:00 Insertion
0:55 Boost
2:00 Height Adjustment Maneuver
3:00 Coelliptic Sequence Initiation
3:50 Constant Delta Height
4:30 Terminal Phase Initiation
4:55 Terminal Phase Final
Once the decision is made to abort, the commander presses the button labeled "Abort Stage" (but certainly not before muttering something unprintable). Immediately, the descent engine is shut down, the LM is staged, program P71 is started on the guidance computer, and the ascent engine is ignited. If the spacecraft is less than 25,000 feet (7,600 metres) above the surface, the LM will pitch over to a vertical attitude to slow its descent, otherwise, it will pitch forward and gain horizontal velocity. At the point of insertion, the CSM is behind the LM, a geometry which makes it impossible for traditional rendezvous maneuvers to be used. Thus, the target of this burn is to achieve a safe orbit with an apocynthion of about 115 miles, which increases the length of time the LM requires to complete one orbit and allows the allows the CSM to move "ahead" of the LM.
Although the high point of the orbit is comfortably above the lunar surface, the pericynthion will most likely be dangerously low. Once the LM reaches the high point of the orbit, a "Boost" maneuver is performed to raise the pericynthion to about 45 nautical miles.
Calculating the velocity needed for this maneuver is more than simply raising the pericynthion, as other orbital parameters, plus maintaining the delicate relationship between the CSM and LM need to be taken into account. These complexities are beyond the capacity of the limited memory of the LM guidance computer. Rather than selecting a specific program to perform the Boost maneuver, the calculations will be performed in the Real Time Computing Center (RTCC) and relayed to the LM crew. The crew, in turn, will use one of the "External Delta V" programs to perform the maneuver and manage this burn. Most of the other programs used in the LM (such as descent, ascent and rendezvous), have the guidance and navigation solutions calculated internally; that is, using only the resources available on the spacecraft. The External Delta-V series of programs use data relayed from the ground and includes the velocity to be gained, the time of, and duration of the burn, and the attitude the spacecraft. Three programs are available for External Delta-V maneuvers, and differ primarily by the engine(s) used for the maneuver. Program 40 is for burns with the Descent Propulsion System, Program 41 uses the RCS plus-X thrusters, and P42 is for burns using the Ascent engine. The unique situations of an abort (whether it was late or early in the powered descent, or whether the LM has staged or not) will determine which of these programs will be used.
With the LM in sufficiently high orbit, attention turns to adjusting its orbit to properly synchronize itself with the CSM. As the LM reaches its pericynthion, it performs a Height Adjustment Maneuver (HAM) which fine-tunes the parameters of the orbit, and as a consequence, adjusts the relative angles of the two spacecraft. Like the Boost maneuver, the HAM burn parameters and the choice of which External Delta-V program are computed on the ground, and communicated to the crew through the CapCom. Performed at the first pericynthion after the abort, the HAM is a small maneuver, and sets the stage for the next stage of the rendezvous.
As the LM reaches its second apocynthion, the beauty of the rendezvous architecture becomes apparent. After the HAM, the LM crew begins tracking the CSM using Program 20, Rendezvous Navigation. This tracking data is used to calculate the CSI maneuver. Despite the fact that the LM will be far higher when performing the CSI during an abort than a rendezvous begun from the surface, the CSI positions the LM for the CDH maneuver. Once the CSI maneuver is performed, procedures revert to the standard techniques for a coelliptic rendezvous with the CSM.
|
|
| Journal Home Page |