
LRV Performance
(incomplete)
Copyright © 2010 by the Editors of Working on the
Moon.
Last revised 20 August 2012.
Header 3
Apollo 15
Pilot's Report on LRV Performance, Apollo 15 Mission Report, section 9.8.3
The major hardware innovation for the lunar exploration phase of the Apollo 15 mission was the lunar roving vehicle. Because of geological requirements during surface traverses, time was limited for evaluating the characteristics of the vehicle. However, during the traverses, a number of qualitative evaluations were made. The following text discusses the performance, and the stability and control of "Rover 1", as well as other operational considerations pertaining to the vehicle.
The manual deployment technique worked very well. Simulations had demonstrated the effectiveness of this technique and, with several minor exceptions, it worked exactly as in preflight demonstrations. The first unexpected condition was noticed immediately after removing the thermal blanket when both walking hinges were found open. They were reset and the vehicle was deployed in a nominal manner. The support saddle, however, was difficult to remove after the vehicle was on the surface. No apparent cause was evident. Additionally, both left front hinge pins were out of their normal detent positions; both were reset with the appropriate tool. After removal of the support saddle, the rover was manually positioned such that "forward" would be the initial driving mode.
Front steering was inoperative during the first extravehicular activity. All switches and circuit breakers were cycled a number of times during the early portion of the first extravehicular activity with no effect on the steering. Subsequently, at the beginning of the second extravehicular activity, cycling of the front steering switch apparently enabled the front steering capability which was then utilized throughout the remaining traverses.
Mounting and dismounting the rover was comparable to preflight experience in 1/6- gravity simulations in the KC-135 aircraft. Little difficulty was encountered. The normal mounting technique included grasping the staff near the console and, with a small hop, positioning the body in the seat. Final adjustment was made by sliding, while using the footrest and the back of the seat for leverage. It was determined early in the traverses that some method of restraining the crew members to their seats was absolutely essential. In the case of Rover 1, the seatbelts worked adequately; however, excessive time and effort were required to attach the belts. The pressure suit interface with the rover was adequate in all respects. None of the preflight problems of visibility and suit pressure points were encountered.
The performance of the vehicle was excellent. The lunar terrain conditions in general were very hummocky, having a smooth texture and only small areas of fragmental debris. A wide variety of craters was encountered. Approximately 90 percent had smooth, subdued rims which were, in general, level with the surrounding surface. Slopes up to approximately 15 percent were encountered. The vehicle could be maneuvered through any region very effectively. The surface material varied from a thin powdered dust [which the boots would penetrate to a depth of 5 to 8 centimeters (2 to 3 inches) on the slope of the Apennine Front to a firm rille soil which was penetrated about 1 centimeter (one-quarter to one-half inch) by the boot. In all cases, the rover’s performance was changed very little.
The velocity of the rover on the level surface reached a maximum of 13 kilometers (7 miles) per hour. Driving directly upslope on the soft surface material at the Apennine Front, maximum velocities of 10 kilometers (5.4 miles) per hour were maintained. Comparable velocities could be maintained obliquely on the slopes unless crater avoidance became necessary. Under these conditions, the downhill wheel tended to dig in and the speed was reduced for safety.
Acceleration was normally smooth with very little wheel slippage, although some soil could be observed impacting on the rear part of the fenders as the vehicle was accelerated with maximum throttle. During a "Lunar Grand Prix", a roostertail was noted above, behind, and over the front of the rover during the acceleration phase. This was approximately 3 meters (10 feet) high and went some 3 meters forward of the rover. No debris was noted forward or above the vehicle during constant velocity motion. Traction of the wire wheels was excellent uphill, downhill, and during acceleration. A speed of 10 kilometers per hour could be attained in approximately three vehicle lengths with very little wheel slip. Braking was positive except at the high speeds. At any speed under 5 kilometers (2.7 miles) per hour, braking appeared to occur in approximately the same distance as when using the 1-g trainer. From straight-line travel at velocities of approximately 10 kilometers per hour on a level surface, the vehicle could be stopped in a distance of approximately twice that experienced in the 1-g trainer. Braking was less effective if the vehicle was in a turn, especially at higher velocities.
Dust accumulation on the vehicle was considered minimal and only very small particulate matter accumulated over a long period of time. Larger particles appeared to be controlled very well by the fenders. The majority of the dust accumulation occurred on the lower horizontal surfaces such as floorboards, seatpans, and the rear wheel area. Soil accumulation within the wheels was not observed. Those particles which did pass through the wire seemed to come out cleanly. Dust posed no problem to visibility.
Obstacle avoidance was commensurate with speed. Lateral skidding occurred during any hardover or maximum-rate turn above 5 kilometers per hour. Associated with the lateral skidding was a loss of braking effectiveness. The suspension bottomed out approximately three times during the entire surface activity with no apparent ill effect. An angular 30- centimeter (1-foot) high fragment was traversed by the left front wheel with no loss of controllability or steering, although the suspension did bottom out. A relatively straight-line traverse was easily maintained by selection of a point on the horizon for directional control, in spite of the necessity to maneuver around the smaller subdued craters. Fragmental debris was clearly visible and easy to avoid on the surface. The small, hummocky craters were the major problem in negotiating the traverse, and the avoidance of these craters seemed necessary to prevent controllability loss and bottoming of the suspension system.
Vehicle tracks were prominent on the surface and very little variation of depth occurred when the bearing on all four wheels was equal. On steep slopes, where increased loads were carried by the downhill wheels, deeper tracks were encountered - perhaps up to 3 or 4 centimeters (an inch or two) in depth. There was no noticeable effect of driving on previously deposited tracks, although these effects were not specifically investigated. The chevron tread pattern left distinct and sharp imprints. In the soft, loose soil at the Apollo lunar surface experiment package site, one occurrence of wheel spin was corrected by manually moving the rover to a new surface.
The general stability and control of the lunar roving vehicle was excellent. The vehicle was statically stable on any slopes encountered and the only problem associated with steep slopes was the tendency of the vehicle to slide downslope when both crewmen were off the vehicle. The rover is dynamically stable in roll and pitch. There was no tendency for the vehicle to roll even when traveling upslope or downslope, across contour lines or parallel to contour lines. However, qualitative evaluation indicates that roll instability would be approached on the 15-degree slopes if the vehicle were traveling a contour line with one crewmember on the downhill side. Both long- and short-period pitch motions were experienced in response to vehicle motion over the cratered, hummocky terrain, and the motion introduced by individual wheel obstacles. The long-period motion was very similar to that encountered in the 1-g trainer, although more lightly damped. The "floating" of the crewmembers in the 1/6-g field was quite noticeable in comparison to 1- g simulations. Contributions of shortperiod motion of each wheel were unnoticed and it was difficult to tell how many wheels were off the ground at any one time. At one point during the "Lunar Grand Prix", all four wheels were off the ground, although this was undetectable from the driver’s seat.
Maneuvering was quite responsive at speeds below approximately 5 kilometers per hour. At speeds on the order of 10 kilometers per hour, response to turning was very poor until speed was reduced. The optimum technique for obstacle avoidance was to slow below 5 kilometers per hour and then apply turning correction. Hardover turns using any steering mode at 10 kilometers per hour would result in a breakout of the rear wheels and lateral skidding of the front wheels. This effect was magnified when only the rear wheels were used for steering. There was no tendency toward overturn instability due to steering or turning alone. There was one instance of breakout and lateral skidding of the rear wheels into a crater approximately 1/2 meter (1-112 feet) deep and 1-1/4 meters (4 feet) wide. This resulted in a rear wheel contacting the far wall of the crater and subsequent lateral bounce. There was no subsequent roll instability or tendency to turn over, even though visual motion cues indicated a roll instability might develop.
The response and the handling qualities using the control stick are considered adequate. The hand controller was effective throughout the speed range, and directional control was considered excellent. Minor difficulty was experienced with feedback through the suited crewmember to the hand controller during driving. However, this feedback could be improved by a more positive method of restraint in the seat. Maximum velocity on a level surface can be maintained by leaving the control stick in any throttle position and steering with small inputs left or right. A firm grip on the handle at all times is unnecessary. Directional control response is excellent although, because of the many dynamic links between the steering mechanism and the hand on the throttle, considerable feedback through the pressure suit to the control stick exists. A light touch on the hand grip reduces the effect of this feedback. An increase in the lateral and breakout forces in the directional hand controller should minimize feedback into the steering.
Two steering modes were investigated. On the first extravehicular activity, where rearwheel-only steering was available, the vehicle had a tendency to dig in with the front wheels and break out with the rear wheels with large, but less than hardover, directional corrections. On the second extravehicular activity, front-wheel-only steering was attempted, but was abandoned because of the lack of rear wheel centering. Four-wheel steering was utilized for the remainder of the mission. It is felt that for the higher speeds, optimum steering would be obtained utilizing front steering provided the rear wheels are center-locked. For lower speeds and maximum obstacle avoidance, four-wheel steering would be optimal. Any hardover failure of the steering mechanism would be recognized immediately and could be controlled safely by maximum braking.
Forward visibility was excellent throughout the range of conditions encountered with the exception of driving toward the zero-phase direction. Washout, under these conditions, made obstacle avoidance difficult. Up-sun was comparable to cross-sun if the opaque visor on the lunar extravehicular visor assembly was lowered to a point which blocks the direct rays of the sun. In this condition, crater shadows and debris were easily seen. General lunar terrain features were detectable within 10 degrees of the zero phase region. Detection of features under high-sun conditions was somewhat more difficult because of the lack of shadows, but with constant attention, 10 to 11 kilometers (5-1/2 to 6 miles) per hour could be maintained. The problem encountered was recognizing the subtle, subdued craters directly in the vehicle path. In general, 1-meter (3 1/4-foot) craters were not detectable until the front wheels had approached to within 2 to 3 meters (6-1/2 to 10 feet).
The reverse feature of the vehicle was utilized several times, and preflight-developed techniques worked well. Only short distances were covered, and then only with a dismounted crewmember confirming the general condition of the surface to be covered.
The 1-g trainer provides adequate training for lunar roving vehicle operation on the lunar surface. Adaptation to lunar characteristics is rapid. Handling characteristics are quite natural after several minutes of driving. The major difference encountered with respect to preflight training was the necessity to pay constant attention to the lunar terrain in order to have adequate warning for obstacle avoidance if maximum average speeds were to be maintained. Handling characteristics of the actual lunar roving vehicle were similar to those of the 1-g trainer with two exceptions: braking requires approximately twice the distance, and steering is not responsive in the 8- to 10-kilometer (4- to 5 1/2- mile) per hour range with hardover control inputs. Suspension characteristics appeared to be approximately the same between the two vehicles and the 1/6-g suspension simulation is considered to be an accurate representation with the exception of the crewmembers’ weight.
The navigation system is accurate and a high degree of confidence was attained in a very short time. Displays are also adequate for the lunar roving vehicle systems.
Lunar communications relay unit.- The lunar communications relay unit and associated equipment operated well throughout the lunar surface activities. The deployment techniques and procedures are good, and the operational constraints and activation overhead are minimum. Alignment of the high-gain antenna was the only difficulty encountered, and this was due to the very dim image of the earth presented through the optical sighting device. The use of signal strength as indicated on the automatic gain control meter was an acceptable back-up alignment technique.
Apollo 15 Lunar Surface Journal,
Notes and Crew Comments
EVA-1 |
||
| Time |
Traverse segment |
Notes and Comments |
| 120:31:57 |
Dave's first time in his Rover seat |
Scott: Oh, you sit
up a lot higher than in one g, but that makes sense,
does it? Discussion of seatbelt mechanism |
| 120:33:03 |
First readout of Rover gauges. |
The
battery charge meters are both showing 105
amp-hours. Both should read 121. See a
discussion following 167:35:58.,
including material from the Mission
Report. The voltage and amp indicators for battery 2 both showed zero. This was determined to be an indicator failure. |
| 120:35:22 |
Initial drive to MESA No front steering |
Discussion of contingency
traverse plans in case the Rover didn't work.
Discussion of the 1-g training version of the Rover
used during some pre-flight field exercises. While Dave drove to the MESA, Jim walked behind trying, unsuccessfully, to take 16mm movie footage and confirming that Dave had rear steering. Dave didn't have front steering. Discussion of using rear-only steering at 120:36:57. |
| 121:15:49 |
Preparation for the first traverse |
Houston
asks Dave to try to move the front wheels
manually. At 121:24:13,
they ask him to change some switch settings. Neither
of these restore front steering. At 121:27:32,
Houston tells Dave that they are conficent that both
batteries are working but that they don't have a
solution for the front steering. Joe says, "We'd
like the Forward Steering switch to Off. We still have
good rear steering." At 142:45:19, in preparation for the EVA-2 traverse, Joe gives Dave some additional procedures to try. Dave tries the procedures at 1430355 and, for whatever reason, discovers he has front steering. Scott: You know what I bet you did last night, Joe? You let some of those Marshall guys come up here and fix it, didn't you?" |
| 121:44:35 |
Start traverse to Station 1 |
Scott: Going to
miss that double Ackerman (front and rear steering), I
can see that now. |
| 121:45:28 |
Driving to Station 1 |
Scott: Hang on. Get
a feel for this thing. Nine kilometers an hour, Joe.
(To Jim) Hold the geology; let's get the Rover squared
away first. (Pause) Okay; 8 kilometers (per hour) up a
little rise. Okay, turning back. (Pause) 203, huh?
Okay. During the Apollo 15 review for the ALSJ, Dave commented "On the Moon, perhaps the measure should be hummocks per minute or craters per minute, rather than km/hr. Eight km/hr may have seemed to be fast because of the many features going by each minute. It certainly did appear that we were going quite rapidly across the surface features." Dean Eppler at NASA Johnson noted that his experiences snowmobiling in Antarctica was similar. "I guess it doesn't matter what planet you're on, if you don't have roads, the going is slow." |
| 121:46:39 |
Comments on speed going uphill Comments about the fenders |
Irwin: Okay, we're
doing 10 kilometers (per hour), now. Now we're heading uphill; when we head uphill, it drops down to about 8. Scott: No dust, Joe, no dust at all. |
| 121:48:21 |
Extensive comments about handling,
steering, and speed |
Scott: Okay, Joe,
the Rover handles quite well. We're moving at, I
guess, an average of about 8 kilometers an hour. It's
got very low damping compared to the one-g Rover, but
the stability is about the same. It negotiates small
craters quite well, although there's a lot of roll. It
feels like we need the seat belts, doesn't it, Jim? Irwin: Yeah, really do. (Pause) Scott: The steering is quite responsive even with only the rear steering. It does quite well. There doesn't seem to be too much slip. I can maneuver pretty well with the thing. If I need to make a turn sharply, why, it responds quite well. There's no accumulation of dirt in the wire wheels. (Pause)<p> Allen: Just like in the owner's manual, Dave. Scott: Okay, I've got it on the wall here (that is, at full throttle) for a minute, and we're up to 12 (km/hr). Irwin: As soon we head upslope, it drops off. Scott: Yeah. Irwin: Or, are you deliberately slowing down? Scott: Yeah, I slowed down in order to get my feeling before we start sprinting. |
| 121:50:39 |
Need to concentrate on the terrain
immediately ahead. |
Scott: Okay, how we
doing on the heading, Jimmer? (Pause) [Scott - "I had to keep my eyes on the road. I couldn't look at the instrument panel. I had to be focused on where we were going, and that's why I asked Jim about the heading. Even though I can cross-check very quickly - from airplane experience, out the window and back - I remember that you had to focus, consciously, so much on where you were going, because it was so irregular and things happened so quick at eight kilometers per hour (or '60 features per minute!', as Dave commented in 1996) that I couldn't take my eyes off of where we were going - even for a second - to look at the instrument panel and make an interpretation of the direction. I relied on Jim to do that for me, and that's why he's giving the distances and I'm asking him for the heading. Which is a reason why you want another guy along with you."] |
| 121:51:34 |
Difficulty seeing down-Sun |
Scott: Whoa. Hang
on. Irwin: Bucking bronco. Scott: Yeah, man. (Pause) You back off on the power, it keeps right on going. (Pause) The zero-phase lighting is pretty tough, Joe. [When looking directly away from the Sun (the zero-phase direction), they can see virtually no shadows and that, combined with the lack of strong color and, most importantly, a general brightening due to a process called Coherent Backscatter, completely washes out the zero-phase view. Jones - "You're talking about zero-phase here but your average heading is about 210 (roughly southwest). So you must be going west to get around something." Scott - "The washed out area around) zero-phase is not (just) due west, it's probably plus or minus 20 degrees (that is, from roughly 250 to 290)." Jones - "But you're doing a significant turn to get around something." Scott - "Apparently."] Scott: We're going to have to make sure we keep at an angle (to downSun). Once I look into zero-phase, it all looks flat. |
| 121:53:50 |
Back end loses traction on turns at
higher speeds |
Scott: Well, I
think there's sort of a...The rear end breaks out at
about 10 to 12 clicks. [That is, the back end tends to swing around if he tries even moderately sharp turns at such speeds.] Allen: Roger, Dave. It sounds like it's like steering a boat, with the rear steering and the rolling motion. Scott: (Responding to Joe) Yeah, that's right. It sure is. |
| 121:54:25 |
Jim sees millimeter-sized particles
thrown up by the front wheels, but not fine dust. |
|
| 121:55:44 |
Rocking-rolling ride |
Scott: (Laughing)
Man, this is really a rocking-rolling ride, isn't
it?<p> Irwin: Never been on a ride like this before.<p> Scott: Boy, oh, boy! I'm glad they've got this great suspension system on this thing. Boy. Extensive discussion from Dave and from Jim about the ride and the suspension. See the Apollo 16 Grandprix film of the Rover in action. Note that the Rover bounces higher than it would with two astronauts aboard. |
| 1215721 |
Driving on thin regolith close to the
rille. |
To this point, Dave and Jim have been
driving on the normal mare surface. Close to the
edge of the rille, some of the ejecta from impacts
falls into the rille, thinning the regolith and
exposing rocks and, very close to the edge,
bedrock. As discussed on pages 5-23 and 24 in
the Apollo
15 Preliminary Science Report, the normal
regolith thickness in the area visited by the crew is
about 5 meters. Starting roughly 200 meters from
the edge of the rille, the thickness of the regolith
gradually decreases until, in the last 25 meters or so
before the edge, "(fine) regolith is essentially
absent, so that numerous boulders and bedrock
protuberances 1 to 3 m across are exposed ...
Rock fragments are more abundant in the vicinity of
the rille rim than they are on the mare surface to the
east. The increase becomes noticeable approximately
200 to 300 m east of the lip of the rille. Most of the
fragments at a distance of 200 to 300 m are a few
centimeters across. The size of the fragments
increases markedly as the surface begins to slope
gently down toward the rille; bedrock is reached the
lip." Irwin: Hey, you can see the rille! There's the rille. Scott: There's the rille. Irwin: Yeah. We're looking down and across the rille, we can see craters on the far side of the rille.<p> Allen: Roger. Like advertised. Irwin: A lot of blocks. (Garbled) to turn the camera on. Scott: Yeah. (Pause) Now we're getting into the blocky stuff, about 1 foot, quite angular, irregular surface. Irwin: We're right at the edge of the rille, I bet you. Scott: Yes, sir. We're on the edge of the rille, you'd better believe it. I think we're heading right... Irwin: I don't see Elbow though. Oh, yeah, I see Elbow. Dave, we have to stay up on the high part of the rille, here. Then, at 121:58:43 Scott: Let me get us back up on the ridge, it's smoother. Irwin: Yeah, I think that heading was...We were on a heading that was a little too far west. We're getting back up on the higher part of the rille rim. At this point, I'd estimate the slope is probably - what? - About 3 degrees? Scott: Yeah, there's a definite ridge or rim that runs along the rille, maybe 70 (or) 80 meters from the inflection point that drops down into the rille, don't you think, Jim? |
The batteries had been charged with 121 amp-hrs each. No discussion in the mission report for an initial readout of 105, 105 or of 110, 115 shortly before leaving the LM.
Apollo 15
Traverse Segments
Pilot's Report on LRV Performance, Apollo 16 Mission Report, section 9.8.4
Manual vehicle deployment was readily accomplished. The crew had to reset both sets of walking hinges, extend three of the four wheels manually, and insert two of the four outboard hinge pins. The forces required to insert the hinge pins were as expected from preflight training.
At initial power-up of the vehicle, the rear steering was inoperative. However, the next time the vehicle was driven, both front and rear steering was operative. The crew has no opinions on what caused the inoperative rear steering on first power-up. Mounting and dismounting of the rover was comparable to the 1/6-g training operations in the KC-135 aircraft.
At times, the Lunar Module Pilot's portable life support system would hang up on the rubber bumper in the rear of the seat, requiring him to bend forward and slide back into the seat. The Commander had some difficulty because of the tightness of his seat belt in that a major effort was needed to push down the handle for seat belt fastening. Nevertheless, the seat belt adjustments made with the seat inserts on the lunar roving vehicle at the Kennedy Space Center mission simulation required no readjustment on the lunar surface for both the Commander and Lunar Module Pilot.
The crew noted a higher than expected temperature on battery 2 which resulted in a power reconfiguration to allow battery 2 cool-down. An off-scale low temperature reading was noted at the completion of the traverse on the third extravehicular activity.
Performance of the lunar roving vehicle was good. The terrain when driving to station 1 on the first extravehicular activity was blocky and hummocky with many subdued-rim craters. Visibility was poor while driving to station 1 in the zero-phase direction (directly away from the Sun). It was impossible to see far enough ahead to drive at maximum speed. Speed on the outbound leg probably averaged less that 5 kilometers per hour. Slopes up to 7 or 8 degrees were negotiated. The visibility effect of zero-phase, in some cases, caused the rover to bounce through subdued craters (2- to 3-meters in diameter) that could not be seen.
The vehicle had no tendency to break out at slow speeds and control was excellent. On the return from station 1 to station 2, the rover tracks were used as directional aids, and tacking out of the sun line allowed an increase in speed to approximately i0 kilometers per hour. At this speed, there was a tendency for the rear wheels to break out during sharp turns. Control was easily regained by turning into the breakout direction. Little wheel slippage was noticed. Rooster tails were noticed when the front and back wheels were driving.
The Survey Ridge region traversed during the second extravehicular activity was so blocky and highly cratered that it was necessary to drive through the smaller secondary craters in order to avoid the larger, steep-walled secondary craters. The vehicle ran in and out of the smaller secondaries with ease and it was in this region that the crew experienced the first of three boulder scrapes on the underside of the vehicle frame. The suspension dynamics as the vehicle bounced out of a secondary crater resulted in the rover scraping a boulder which it normally would have cleared.
The vehicle climbed very steep slopes going up Stone Mountain. In several instances, the pitch needle was pegged at 20 degrees, although the face of the pitch gauge fell off as the crew departed Survey Ridge. The only way the crew was able to judge upslope vehicle movement in the lunar environment was by the reduction in the speed of
the vehicle as it climbed the slope. The best way to negotiate slopes in the rover is to go straight up and straight down. Going cross-slope or parallel to contour lines produces right or left rolls of 10 to 15 degrees. The feeling is very uncomfortable, even though the vehicle was never unstable during cross-slope driving. At station 4, the lunar roving vehicle was parked in a flat bottom crater in order to eliminate the possibility that the vehicle would roll down the hill.
The right rear fender was lost at station 8. Subsequently, the right rear wheel produced a shower of dust over the vehicle which appears in the 16-mm motion picture photography as falling snow. However, a great deal more dust was actually produced by the wheel than shows up in the film. The crew and the front of the vehicle, particularly the instrument panels, were covered with dust. The instrument panel and the start, stop, and closeout decals had 1/4 inch of dust over them at the completion of the third extravehicular activity.
Driving north of Palmetto Crater on the third extravehicular activity, it was possible to leave the throttle at a maximum setting to achieve speeds of 10 to 12 kilometers per hour while continuing on a straight course. One turn at this speed produced a rear-wheel breakout of approximately 60 degrees. This was corrected by hardover steering in the opposite direction, after which the brakes were applied. When stopped, the vehicle was pointing about 110 degrees and the direction was opposite to that at which breakout occurred. There were no full spin-outs during any traverse. When the vehicle broke out, even at high speed, the turn into the breakout with simultaneous braking always produced a stable stop. The dynamic vertical motions of the vehicle during the Grand Prix were exaggerated because of the single crewman. The weight of two crewmen appeared to give the vehicle more stability and to minimize the height of bounces.
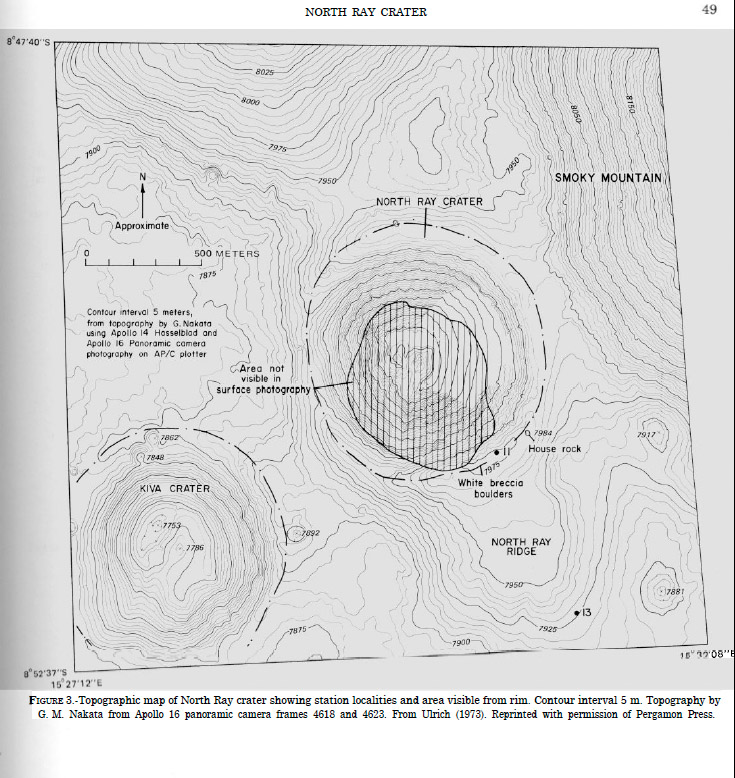
The navigation system was noted to have failed as the crew departed station 9 on the second extravehicular activity (see sec. 14.6.3). Driving north, the crew took a heading of 30 degrees to intercept the esrlier tracks of the outbound leg to station 4 on Stone Mountain. The lunar module was acquired visually at a distance of 200 meters, however, and the outbound tracks were not intercepted. The navigation system was reset at the lunar module and it performed accurately during the third extravehicular activity. It was a major aid in locating the rim of North Ray Crater.
The vehicle handled very much like the l-g trainer except that the pilot-lnduced lateral high-speed oscillations which were experienced in the 1-g trainer were not apparent in 1/6-g. The steering sensitivity that had been anticipated from reading the Apollo 15 mission report did not exist. The most likely reason that the lateral sensitivity was not experienced was that the excellent restraint of the seat belt prevented the Comuander's arm from moving and putting inadvertent feedback into the controller.
The battery covers were opened at the completion of each extravehicular activity. Opening the battery covers threw dust onto the battery mirror surfaces; therefore, the mirrors were completely brushed after each extravehicular activity and were brushed twice at final rover parking after completing the third extravehicular activity. Even though the mirror surfaces were brushed as well as possible, battery 2 temperature caused the actuation of a caution and warning flag while driving to station ll/12.
The crew felt, subjectively, that they were riding 1/2- to 1-inch higher than they had ridden in the 1-g training vehicle. The reason for this is that, in 1/6-g, the crewman sits much higher inside the pressure suit than he does in 1-g.
The maps and the map holder were inaccessible while the rover was in motion. The only map used during the traverses was the contour map with the bearings and distances to stations on it. A fastening clip would allow the Lunar Module Pilot to use the contour map while the rover is in motion.
During initial lunar communications relay unit installation on the lunar roving vehicle, the integrity of the power cables was difficult to maintain. When the Lunar Module Pilot released the cable to check the connection, the cable memory would cause the connector to pull free from the attach point.
At the last two stations of the third traverse, the rover was parked on slopes such that the lunar communications relay unit antenna mast was essentially vertical when the antenna was pointing at the earth. Therefore, any motion on the antenna handle in yaw produced motions in roll and pitch. This made antenna alignment more time-consuming at the last stations. The Lunar Module Pilot assisted in pointing the antenna in several instances. There were also several instances in which the Commander could not use the automatic gain control meter when aligning the antenna because he was standing in front of the lunar communication relay unit. In those cases, a quick vector from the Lunar Module Pilot enabled S-band high gain acquisition. The final lunar communications relay unit alignment tune-up always placed the earth image in the antenna alignment sight.
The lunar communications relay unit was brushed at all extravehicular activity stops and was brushed after opening the battery covers. The thermal cover was folded over the lunar communications relay unit switches at the final stop as stated in the preflight instructions.
| Location | Ground Elapsed Time (hhh:mm:ss) | Odometer (km) | Battery (amp-hrs) | Travel Time (mm:ss) | Odometer: Dist.(km) Vel.(km/hr) |
Map: Dist.(km) Vel.(km/hr) |
Notes |
EVA-1 |
|||||||
| LM |
121:44:35 | 0.0 |
110, 115* |
26:11 |
4.5 10.3 |
*The batteries had been charged with 121 amp-hrs each. No discussion in the mission report for an initial readout of 105, 105 or of 110, 115 an hour later, shortly before leaving the LM. | |
| Station 1 Arrive |
122:10:46 |
4.5 |
105, 112 |
||||
| Station 1 Depart |
122:28:35 |
6:41 |
1.0 9.0 |
Beginning at
about 122:31:19,
they started driving on the lower slopes of Mt. Hadley
Delta. At 122:32:46,
Dave mentions that "We're going uphill pretty
good." A minute later, Jim mentions that their
"speed's dropped down to 7 clicks (km/hr)." |
|||
| Station 2 Arrive |
122:35:16 |
5.5 |
105, 110 |
||||
| Station 2 Depart |
123:26:02 |
33:19 |
4.8 8.6 |
Going downhill,
they had to be careful or their speed. At 123:28:42,
the rear wheels lost traction and the Rover spun 180
degrees, leaving them pointed uphill. Once they reached Elbow Crater, Dave decided to follow the Nav system back to the LM. At that time, 123:33:04, the indicated bearing and range to the LM was 11 degrees east of north and 3.3 km. |
|||
| LM arrive |
123:59:21 |
10.3 |
100, 107 |
||||
EVA-2 |
|||||||
| Location | Ground Elapsed Time (hhh:mm:ss) | Odometer (km) | Battery (amp-hrs) | Travel Time (mm:ss) | Odometer: Dist.(km) Vel.(km/hr) |
Map: Dist.(km) Vel.(km/hr) |
Notes |
| LM Depart | 143:11:13 |
0.0 |
100, 108 |
42:43 |
6.5 9.1 |
They leave
the mare surface and start up onto the lower slopes of
Mt. Hadley Delta at 143:45:20. |
|
| Station 6 arrive |
143:53:56 |
6.5 |
92, 100 |
||||
| Station 6 Depart |
144:58:18 |
2:53 |
0.4 8.3 |
They drove
this segment roughly parallel to the contour, neither
climbing nor descending. |
|||
| Station 6a Arrive |
145:01:11 |
6.9 |
97, 100 |
||||
| Station 6a depart |
145:22:40 |
3:53 |
0.4 6.2 |
They drove
this segment going diagonally downhill and after their
experience driving downhill from Station 2, went
slowly. |
|||
| Station 7 Arrive |
145:26:33 |
7.3 |
95, 100 |
||||
| Station 7 Depart |
146:16:04 |
12:55 |
1.6 7.4 |
After
driving downhill from Station 7, they reached the mare
surface at about 146:21:02 |
|||
| Station 4 Arrive |
146:28:59 |
8.9 |
94, 100 |
||||
Pilot's Report on LRV Performance, Apollo 16 Mission Report, section 9.8.4
Manual vehicle deployment was readily accomplished. The crew had to reset both sets of walking hinges, extend three of the four wheels manually, and insert two of the four outboard hinge pins. The forces required to insert the hinge pins were as expected from preflight training.
At initial power-up of the vehicle, the rear steering was inoperative. However, the next time the vehicle was driven, both front and rear steering was operative. The crew has no opinions on what caused the inoperative rear steering on first power-up. Mounting and dismounting of the rover was comparable to the 1/6-g training operations in the KC-135 aircraft.
At times, the Lunar Module Pilot's portable life support system would hang up on the rubber bumper in the rear of the seat, requiring him to bend forward and slide back into the seat. The Commander had some difficulty because of the tightness of his seat belt in that a major effort was needed to push down the handle for seat belt fastening. Nevertheless, the seat belt adjustments made with the seat inserts on the lunar roving vehicle at the Kennedy Space Center mission simulation required no readjustment on the lunar surface for both the Commander and Lunar Module Pilot.
The crew noted a higher than expected temperature on battery 2 which resulted in a power reconfiguration to allow battery 2 cool-down. An off-scale low temperature reading was noted at the completion of the traverse on the third extravehicular activity.
Performance of the lunar roving vehicle was good. The terrain when driving to station 1 on the first extravehicular activity was blocky and hummocky with many subdued-rim craters. Visibility was poor while driving to station 1 in the zero-phase direction (directly away from the Sun). It was impossible to see far enough ahead to drive at maximum speed. Speed on the outbound leg probably averaged less that 5 kilometers per hour. Slopes up to 7 or 8 degrees were negotiated. The visibility effect of zero-phase, in some cases, caused the rover to bounce through subdued craters (2- to 3-meters in diameter) that could not be seen.
The vehicle had no tendency to break out at slow speeds and control was excellent. On the return from station 1 to station 2, the rover tracks were used as directional aids, and tacking out of the sun line allowed an increase in speed to approximately i0 kilometers per hour. At this speed, there was a tendency for the rear wheels to break out during sharp turns. Control was easily regained by turning into the breakout direction. Little wheel slippage was noticed. Rooster tails were noticed when the front and back wheels were driving.
The Survey Ridge region traversed during the second extravehicular activity was so blocky and highly cratered that it was necessary to drive through the smaller secondary craters in order to avoid the larger, steep-walled secondary craters. The vehicle ran in and out of the smaller secondaries with ease and it was in this region that the crew experienced the first of three boulder scrapes on the underside of the vehicle frame. The suspension dynamics as the vehicle bounced out of a secondary crater resulted in the rover scraping a boulder which it normally would have cleared.
The vehicle climbed very steep slopes going up Stone Mountain. In several instances, the pitch needle was pegged at 20 degrees, although the face of the pitch gauge fell off as the crew departed Survey Ridge. The only way the crew was able to judge upslope vehicle movement in the lunar environment was by the reduction in the speed of
the vehicle as it climbed the slope. The best way to negotiate slopes in the rover is to go straight up and straight down. Going cross-slope or parallel to contour lines produces right or left rolls of 10 to 15 degrees. The feeling is very uncomfortable, even though the vehicle was never unstable during cross-slope driving. At station 4, the lunar roving vehicle was parked in a flat bottom crater in order to eliminate the possibility that the vehicle would roll down the hill.
The right rear fender was lost at station 8. Subsequently, the right rear wheel produced a shower of dust over the vehicle which appears in the 16-mm motion picture photography as falling snow. However, a great deal more dust was actually produced by the wheel than shows up in the film. The crew and the front of the vehicle, particularly the instrument panels, were covered with dust. The instrument panel and the start, stop, and closeout decals had 1/4 inch of dust over them at the completion of the third extravehicular activity.
Driving north of Palmetto Crater on the third extravehicular activity, it was possible to leave the throttle at a maximum setting to achieve speeds of 10 to 12 kilometers per hour while continuing on a straight course. One turn at this speed produced a rear-wheel breakout of approximately 60 degrees. This was corrected by hardover steering in the opposite direction, after which the brakes were applied. When stopped, the vehicle was pointing about 110 degrees and the direction was opposite to that at which breakout occurred. There were no full spin-outs during any traverse. When the vehicle broke out, even at high speed, the turn into the breakout with simultaneous braking always produced a stable stop. The dynamic vertical motions of the vehicle during the Grand Prix were exaggerated because of the single crewman. The weight of two crewmen appeared to give the vehicle more stability and to minimize the height of bounces.
The navigation system was noted to have failed as the crew departed station 9 on the second extravehicular activity (see sec. 14.6.3). Driving north, the crew took a heading of 30 degrees to intercept the esrlier tracks of the outbound leg to station 4 on Stone Mountain. The lunar module was acquired visually at a distance of 200 meters, however, and the outbound tracks were not intercepted. The navigation system was reset at the lunar module and it performed accurately during the third extravehicular activity. It was a major aid in locating the rim of North Ray Crater.
The vehicle handled very much like the l-g trainer except that the pilot-lnduced lateral high-speed oscillations which were experienced in the 1-g trainer were not apparent in 1/6-g. The steering sensitivity that had been anticipated from reading the Apollo 15 mission report did not exist. The most likely reason that the lateral sensitivity was not experienced was that the excellent restraint of the seat belt prevented the Comuander's arm from moving and putting inadvertent feedback into the controller.
The battery covers were opened at the completion of each extravehicular activity. Opening the battery covers threw dust onto the battery mirror surfaces; therefore, the mirrors were completely brushed after each extravehicular activity and were brushed twice at final rover parking after completing the third extravehicular activity. Even though the mirror surfaces were brushed as well as possible, battery 2 temperature caused the actuation of a caution and warning flag while driving to station ll/12.
The crew felt, subjectively, that they were riding 1/2- to 1-inch higher than they had ridden in the 1-g training vehicle. The reason for this is that, in 1/6-g, the crewman sits much higher inside the pressure suit than he does in 1-g.
The maps and the map holder were inaccessible while the rover was in motion. The only map used during the traverses was the contour map with the bearings and distances to stations on it. A fastening clip would allow the Lunar Module Pilot to use the contour map while the rover is in motion.
During initial lunar communications relay unit installation on the lunar roving vehicle, the integrity of the power cables was difficult to maintain. When the Lunar Module Pilot released the cable to check the connection, the cable memory would cause the connector to pull free from the attach point.
At the last two stations of the third traverse, the rover was parked on slopes such that the lunar communications relay unit antenna mast was essentially vertical when the antenna was pointing at the earth. Therefore, any motion on the antenna handle in yaw produced motions in roll and pitch. This made antenna alignment more time-consuming at the last stations. The Lunar Module Pilot assisted in pointing the antenna in several instances. There were also several instances in which the Commander could not use the automatic gain control meter when aligning the antenna because he was standing in front of the lunar communication relay unit. In those cases, a quick vector from the Lunar Module Pilot enabled S-band high gain acquisition. The final lunar communications relay unit alignment tune-up always placed the earth image in the antenna alignment sight.
The lunar communications relay unit was brushed at all extravehicular activity stops and was brushed after opening the battery covers. The thermal cover was folded over the lunar communications relay unit switches at the final stop as stated in the preflight instructions.
Apollo 15 Lunar Surface Journal,
Notes and Crew Comments
EVA-1 |
||
| Time | Traverse Segment | Notes and Comments |
| 119:34:02 |
John's first time in the Rover seat |
Mentions that he seems to be
sitting higher than he did in the rover mock-up
they used in the KC-135 aircraft flying 1/6th-g
parabolas so they could adjust the seat belt
lengths. Discussion of the seat-belt
problems the A15 crew had and the need for
adjustment. John doesn't comment on the seatbelt
fit, but neither of them has any problems on the
Moon. |
| 119:36:42 |
Driving to the MESA |
Charlie confirms that John has
steering with all four wheel. At 119:38:21,
Charlie comments on how slowly John driving. Young: Yeah, the wheels are skidding, Charlie.<p> Duke: Okay, your rear steering's off. Young: Huh? Duke: You don't have any rear steering. Young: Is that what the problem is? Duke: Yeah. They decide not to do any troubleshooting until John is ready to drive to the ALSEP site. At 120:45:21, when John is preparing to drive, he moves the handcontroller and Charlie sees the rear wheels moving in responds to steering commands. John suggests that, "Maybe it just needs to sit around and heat up." On Apollo 15, the rear steering did not work during the first EVA but did on the second and third. A discussion from the Apollo 16 Mission report suggests that the problem was a lubricant used in the handcontroller that was viscous at low temperatures. |
Apollo 16 Traverse Segments
| Location |
Ground Elapsed Time (hhh:mm:ss) |
Odometer (km) |
Range (km) |
Battery (amp-hrs) |
Travel Time (mm:ss) |
Odom. Diff. Odom. Diff / Trvl.Time |
MapDist. MapDist. / Trvl.Time |
Notes |
EVA-1 |
||||||||
| LRV Offload |
119:34:58 |
0 |
0 |
125, no reading |
John reports that the battery-2 amp-hour
indicator is off-scale low. |
|||
| ALSEP Depart | 122:59:06 | 0.1 |
0.1 |
118, 118 |
24:48 |
1.9 km 4.8 km/hr |
1.6 km 3.9 km/hr |
Caution driving down-Sun. LM map location uncertain till they get to Plum. Brief, unplanned stop at Halfway Crater because of nav. undertainty. |
| Station 1 Arrive | 123:23:54 | 2.0 |
1.4 |
nr = not reported |
||||
| Station 1 Depart | 124:14:32 | 6:15 |
0.8 km 7.7 km/hr |
0.7 km 6.7 km/hr |
Followed outbound tracks so
less caution despite poor up-Sun visibility. John
mentions in the mission report that he did some tacking
to improve visibility. |
|||
| Station 2 Arrive |
124:20:47 | 2.8 |
0.8 |
nr |
||||
| Station 2 Depart |
124:48:20 | 5:47 |
1.0 km 10.4 km/hr |
0.9 km 9.3 km/hr |
On the return to the LM, they
stopped near the ALSEP so that Charlie could film John
doing the Grand
Prix, which involved John driving the LRV toward
the LM and back. John drove for about 25 seconds
toward the LM, reporting a max speed of 10 km/hr along
the way. He then turned and drove back in about 25
seconds. The distance driven was no more than 140
meters. He then did a second run. In total,
each of the runs took about 1 min 05 seconds. *The odometer value used at the ALSEP when they get back is the value given later at the LM minus 0.4 km, total, for the two Grand Prix runs and the 0.1 km return to the LM. |
|||
| ALSEP Arrive |
124:54:07 |
3.8* |
0.1 |
nr |
||||
| LM Arrive |
125:09:43 |
4.2 |
0 |
108, 105 |
- |
- |
- |
|
| EVA-1
Totals Driving Time: 40:00 (est.) Odometer distance and speed: 4.2 km, 6.3 km/hr Map distance and speed: 3.2 km, 4.8 km/hr |
||||||||
EVA-2 |
||||||||
| Ground Elapsed Time (hhh:mm:ss) | Odometer (km) | Range (km) | Battery (amp-hrs) | Travel Time (mm:ss) |
Odom.Diff Odom.Diff / Trvl.Time |
MapDist. MapDist. / Trvl.Time |
Notes | |
| LM Depart |
143:31:40 | 0 |
0 |
108, 105 from EVA-1 Close-out | 23:56 |
5.2 km 8.7 km/hr |
3.1 km 7.8 km/hr |
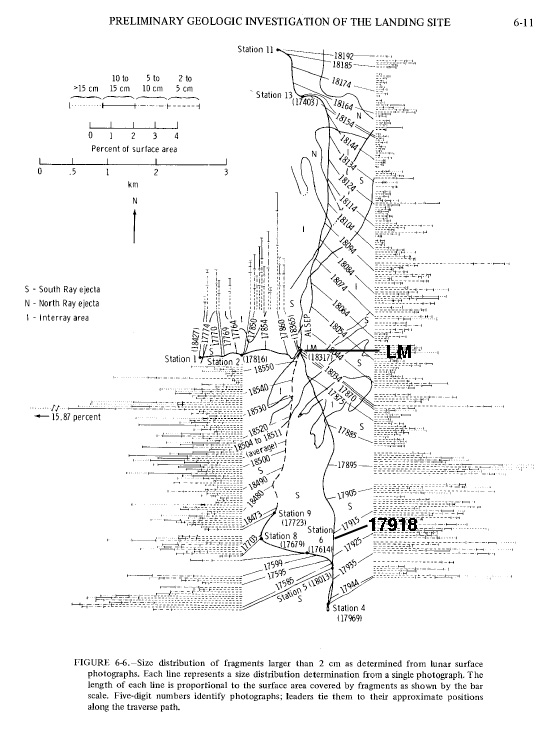
Figure 6-6 from the Apollo 16 Preliminary Science Report shows the various station locations and approximate locations from which Charlie took various traverse photos. John and Charlie drove SSE from the LM, climbed up onto Survey Ridge and drove SSW along it before heading to a point at the base of Stone Mountain directly north of Station 4. The started climbing at about the indicated place whereCharlie took photo 17918. Their average speed along their actual path is necessarily greater than the 7.5 km/hr range rate. |
| Base of Stone Mountain |
143:55:36 | nr |
3.0 |
nr |
||||
| Base of Stone Mountain |
143:55:36 | nr |
3.0 |
nr |
11:53 |
1.2 km 6.1 km/hr |
Station 4 and the approximate spot where Charlie took 17918 are shown in a labeled detail from topographic map LTO78D2S1(50) (5.7 Mb) indicates that they were driving cross-slope and climbed about 145 meters in 1.1 km. The slope they experience is about 7.5 degrees. | |
| Station 4 Arrive |
144:07:29 | 5.2 |
4.1 |
100, 100 |
||||
| Station 4 Depart |
145:04:22 |
5:08 |
0.7 km 8.2 km/hr |
0.7 km 8.2 km/hr |
Followed their outbound tracks
partway downhill. Young: Ya-ho-ho-ho-ho. (Pause) Look at this baby (meaning the Rover). I'm really getting confidence in it now. It's really humming like a kitten. Duke: Oh, this machine is super. CapCom Tony England: Probably a good idea you couldn't see how steep it was going up. Young: Darn right it was. (Pause) Okay. I've got the power off, and we're making 10 kilometers an hour. Just falling down our own tracks. (Pause) Uh-oh. Duke: Almost spun out. |
|||
| Station 5 Arrive |
145:09:30 |
5.9 |
3.5 |
100, 100 |
||||
| Station 5 Depart |
145:58:40 |
6:39 |
0.8 km 7.2 km/hr |
0.5 km 4.5 km/hr |
Young: Okay, we're riding at idle
(meaning that he is not applying any power to the
wheels), and she's picking up speed ... I'm just glad
that we don't have that watch-the-Rover-go TV.
(Laughing) Because I don't think we'd be
going. (Pause) John is probably saying that, if Houston had real-time TV of this drive, the NASA managers would be having heart-failure and would make the crew stop and walk down the mountain. At 146:03:32, they turn left and drive west along a bench to find a suitable crater for sampling. |
|||
| Station 6 Arrive |
146:05:19 |
6.7 |
3.1 |
100, 95 |
||||
| Station 6 Depart |
146:29:22 |
10:46 |
1.2 km 6.7km/hr |
0.8 km 4.5 km/hr |
They drive west for most of
this segment, then turn south to climb a ridge.
This probably slows them somewhat, but an
incorrectly-set Rover circuit breaker also
contributes. Houston helps them correct the
problem before they leave Station 8 |
|||
| Station 8 Arrive |
146:40:08 |
7.9 |
2.9 |
95, 95 |
||||
| Station 8 Depart |
147:48:15 |
3:09 |
* |
0.5 km 9.5 km/hr |
*The nav system is not working
properly, probably because of the various changes in
switch and circuit breaker setting made while diagnosing
the drive power problem. |
|||
| Station 9 Arrive |
147:51:24 |
* |
* |
90, 90 |
||||
| Station 9 Depart |
148:29:45 |
24:28 |
* |
2.6 km 6.4 km/hr |
*They notice the nav system
errors during this segment. They do the Station 10
activities near the ALSEP. |
|||
| Station 10 Arrive |
148:54:13 |
* |
* |
65, 110 |
||||
| EVA-2
Totals Driving Time: 86:00 (est.) Odometer distance and speed: 11.3 km, 7.9 km/hr (map distance plus 10% for the last two segments) Map distance and speed: 9.4 km, 6.6 km/hr |
||||||||
EVA-3 outbound |
||||||||
| Location | Ground Elapsed Time (hhh:mm:ss) | Odometer (km) | Range (km) Bearing (degrees east of north) |
Battery (amp-hrs) | Travel Time (mm:ss) |
Odom.Diff. Odom.Diff. / Trvl.Time |
MapDist. MapDist. / Trvl.Time |
Notes |
| LM Depart |
166:09:13 |
0 |
0 0 |
60, 115 |
13:02 |
nr |
1.7 km* 7.8 km/hr |
They climb a ridge immediately
north of the LM, then back down into a "big, sag-type
area", and continue north to the elevated rim of
Palmetto Crater and along the rim toward End Crater. *Map location directly from LRV nav. readout of range and bearing to the LM. On Figure 3.6.2-8a in Final Lunar Surface Procedures, the LM is at CB.1/80.6 and their location on the Palmetto rim is CK.4/82.5 |
| Palmetto rim |
166:22:15 |
nr |
1.7 193 |
nr |
||||
| Palmetto rim |
166:22:15 | nr |
1.7 193 |
nr |
14:13 |
nr |
2.0 km* 8.4 km/hr |
England: Y'all are making some
outstanding time there. Duke: It's really easy going, Tony. (Hears Tony) Well, he's got it full blower at 11 clicks, and we're just going over an undulating terrain. *Map location directly from LRV nav. readout of range and bearing to the LM. Their map location at the end of this segment is CV.5/82.5. |
| Base of North Ray ridge |
166:36:28 |
nr |
3.7 186 |
nr |
||||
| Base of North Ray ridge |
166:36:28 | nr |
3.7 186 |
nr |
2:09 |
nr |
0.2 km 5.6 km/hr |
At the start of this interval,
they are just east of Station 13. As can be seen
in the contour map
from the North
Ray
chapter of the A16 Professional Paper, they climb
about 25 meters over the next 200 meters, a slope of
about 7 degrees. |
| Top of the 1st rise |
166:38:37 |
nr |
nr |
nr |
||||
| Top of the 1st rise |
166:38:37 | nr |
nr |
nr |
5:46 |
nr |
0.6 km 6.2 km/hr |
Young: Okay. (Pause) We're
on a relatively flat surface now Over the next 450 meters, they climb about 10 meters, on a slope of 1.3 degrees, and then finish with a climb of about 15 meters over the final 150 meter to Station 11, a slope of about 6 degrees. As discussed in the ALSJ after 166:45:15, the bearing and range puts them well inside the rim, about 250 meters north of their actuall location. This unusualy-large difference may be due to wheel slippage during the climb up North Ray Ridge. |
| Station 11 Arrive |
166:44:23 |
5.5 km |
4.5 km 179 |
60, 115 |
||||
EVA-3 Outbound Totals Driving time: 35:10 Odometer distance(less 0.2 km) and speed: 5.3 km, 9.0 km/hr Map Distance and Speed: 4.5 km, 7.7 km/hr |
||||||||
EVA-3 Return |
||||||||
| Station 11 Depart |
168:09:46 |
5.5 km |
4.5 km 179 |
60, 115 |
7:53 |
1.0 km 7.6 km/hr |
0.9 km 6.8 km/hr |
They follow they outbound
tracks downhill toward Station 13. Duke: We can't see old (LM) Orion from here. (Laughing) This is going to be something going down this hill ... Look at that slope! Be sure that you got the brakes on. Tony, this is at least a 15-degree slope we're going down, and that Rover came right up it and you never even knew it. (Pause) Brake that beauty, John. (Laughs) Man, are we accelerating. Super. Young: (To Tony) We've just set a new world's speed record, Houston; 17 kilometers an hour on the Moon. At 168:14:31, they reach the top of the 1st rise. They've done 0.6 km in 4:45, giving a speed of 7.6 km/hr. On arrival at Station 13, the location error has reduced to 180 meters, perhaps because of John's use of the LRv brakes coming downhill. |
| Station 13 Arrive |
168:17:39 |
6.5 km |
3.8 184 |
50, 110 |
||||
| Station 13 Depart |
168:46:33 |
6.5 km |
3.8 184 |
50, 110 |
13:35 |
nr |
2.0 km 8.8 km/hr |
Nearing the rim of Palmetto,
Charlie gives a range and bearing about a minute after
he mentions that they are "passing End Crater".
That suggests that the nav system still thinks the LRV
is north of its actual location, now by roughly 150
meters. They are near CK.6/82.5 |
| Palmetto |
169:00:08 |
nr |
1.9 192 |
nr |
||||
| Palmetto |
169:00:08 | nr | 1.9 192 |
nr | 15:18 |
nr |
1.9 km 7.5 km/hr |
Station 10' is due north of
the ALSEP The segment from Station 13 to Station 10' covered sn odometer distance of 3.8 km, done in 28:53, at an average speed of 7.9 km/hr. |
| Station 10' Arrive |
169:15:26 |
11.1 km |
0.1 188 |
30, 120 |
||||
| EVA-3
Return
Totals Driving Time: 36:46 Odometer distance and speed: 5.6 km, 9.1 km/hr Map distance and speed: 4.8 km, 7.8 km/hr |
||||||||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pilot's Report, Apollo 17 Mission Report, section 10.8.4 Lunar Roving Vehicle
Lunar roving vehicle deployment and preparation for loading the tools and experiments proceeded normally. The only discrepancy was that several of the yellow hinge pins had to be forcefully set to assure that the fore and aft chassis was locked. The manual deployment went well; however, takeup reels or closed-loop deployment cables would have improved the operation.
The lunar roving vehicle loading proceeded well with the ground controlled television assembly , lunar communications relay unit, all pallets, and the experiments being easily attached. Difficulty was experienced in mating the surface electrical properties receiver electrical plug to the vehicle, but this has been previously experienced with this type of electrical connector.
All lunar roving vehicle systems functioned properly during powerup and the short test drive. The only unexpected condition was a slightly high battery 2 temperature, and this was attributed to the delay on the launch pad and slight differences in the nominal trajectory and sun attitudes during translunar coast. This ultimately caused little or no problem because of the cool-down capability of the radiators during some of the long station stops.
Double Ackermann fore and aft steering was used throughout all extravehicular activities, and it greatly enhanced the maneuverability of the vehicle when negotiating craters and rocks. The acceleration was about as expected with a slightly lower average speed, possibly because of the heavier loaded rover on this mission. Sloped of up to 20 degrees were easily negotiated in a straight-ahead mode. While climbing such slopes at full power, the vehicle decelerated to a constant speed of 4 to 5 kilometers per hour. Coming down these slopes, the vehicle was operated in a braking mode with no indication of brake-fading, or feeling that the rover could not be controlled. Side slopes were negotiable, but not necessarily comfortable. During the second and third extravehicular activity, familiarity with the rover, both in riding and in driving, allowed the crew to go places and negotiate side slopes that engendered a great deal more caution during the first extravehicular activity.
The batteries were not dusted until well into the second extravehicular activity; however, after that time, the battery covers were brushed clean at every stop. The cleanliness of the batteries is attributed to the fact that the covers were continually dusted and kept clean. Dusting was time-consuming, but it was no greater problem than anticipated preflight , and it was part of the overhead in system management that leads to successful vehicle operation.
The right rear fender was accidentally knocked off by catching it with a hammer handle. This resulted in breaking about 2-inches off of the inside rail on the permanent fender. The fender extension was replaced and taped into position; however, tape does not hold well when placed over dusty surfaces. The fender extension was lost after about an hour's driving. Prior to the second extravehicular activity, a temporary fender was made from maps and taped andd clamped into position, where it worked satisfactorily. Loss of the fender created concern that the dust problem would severely limit the crew's operation and the capabilities of the rover systems, not only thermally, but mechanically.
In summary, the lunar roving vehicle operation was approached cautiously; but during the second and throughout the third extravehicular activity the vehicle was pushed to the limits of its capability. Although the crew believed that the rover could have negotiated slopes of 20 to 25 degrees without great difficulty, side slope operation never became comfortable. The rear wheels broke out only on exceptionally sharp turns when the vehicle was moving at high speeds. Slippage seemed to be minimal . During the second, and principally the third extravehicular activity , a large portion of driving time on the rover was spent negotiating boulder and crater fields , with one of the four wheels bouncing off the surface at regular intervals . The rover is is an outstanding device which increased the capability of the crew to explore the Taurus-Littrow region and enhanced the lunar surface data return by an order of magnitude and maybe more.
Return to Table of Contents