



















STS-1
NASA'S First Space Shuttle Mission
orbiter
mission duration
Launch
Landing

Mission Facts
Mission: First Shuttle Mission/Shuttle Systems Test Flight
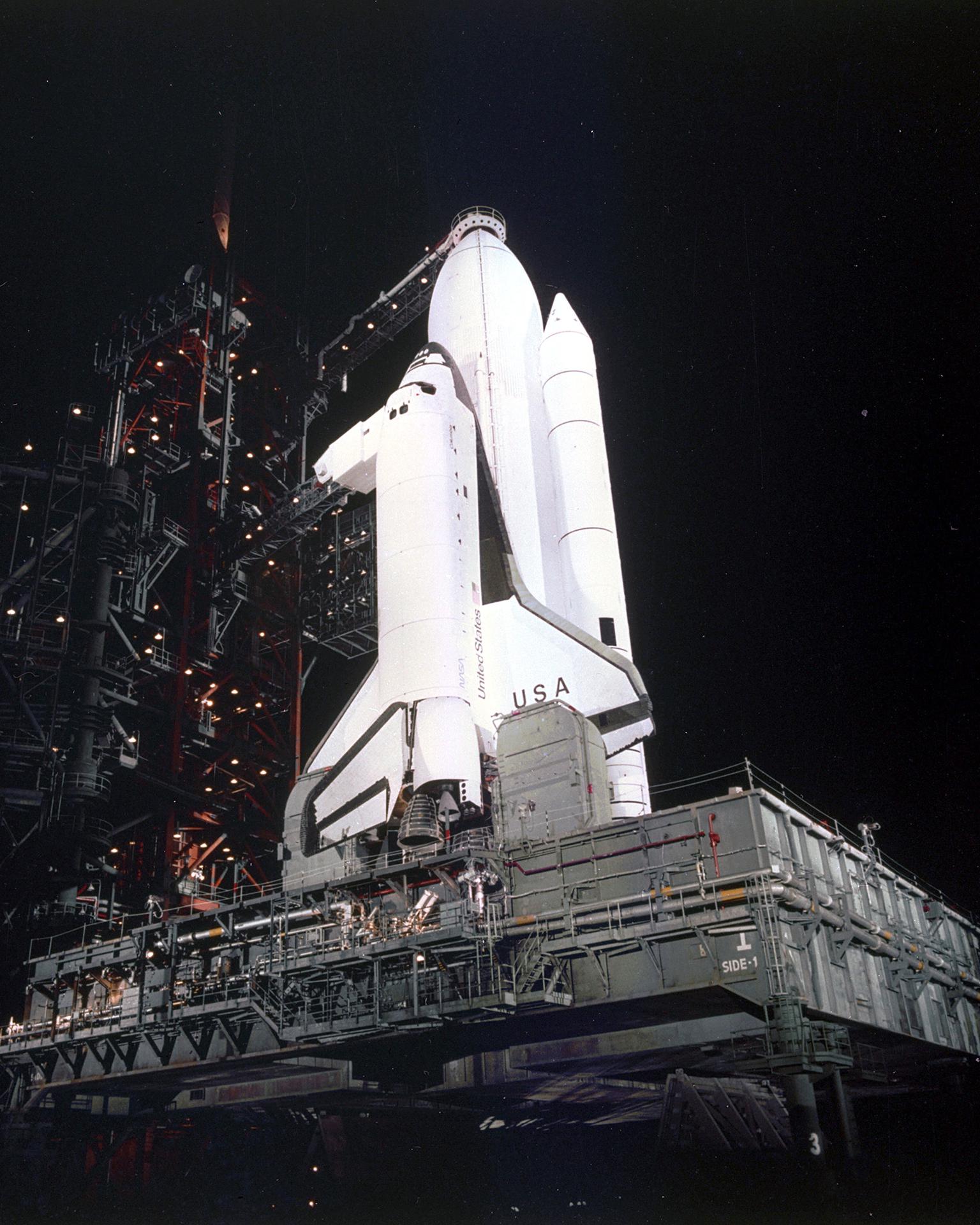
Space Shuttle: Columbia
Launch Pad: 39A
Launched: April 12, 1981 at 7:00:03 a.m. EST
Launch Weight: 219,258 pounds
Landing Site: Edwards Air Force Base, Calif.
Landing: April 14, 1981 at 10:20:57 a.m. PST
Runway: 23
Rollout Distance: 8,993 feet
Rollout Time: 60 seconds
Revolution: 37
Mission Duration: 2 days, 6 hours, 20 minutes, and 53 seconds
Returned to KSC: April 28, 1981
Orbit Altitude: 166 nautical miles
Orbit Inclination: 40.3 degrees
Miles Traveled: 1.074 million
Mission Objectives
Demonstrate safe launch into orbit and safe return of the orbiter and crew. Verify the combined performance of the entire shuttle vehicle – orbiter, solid rocket boosters and external tank.
Payloads included the Developmental Flight Instrumentation (DFI) and the Aerodynamic Coefficient Identifications Package (ACIP) pallet containing equipment for recording temperatures, pressures and acceleration levels at various points on the vehicle.
Mission Highlights
Major systems tested successfully on first flight of Space Transportation System. Orbiter sustained tile damage on launch and from overpressure wave created by the solid rocket boosters. Subsequent modifications to the water sound suppression system eliminated the problem. A total of sixteen tiles were lost and 148 tiles were damaged.
John W. Young
Commander
John W. Young logged more than 15,275 hours flying time in props, jets, helicopters, rocket jets, more than 9,200 hours in T-38s, and six space flights of 835 hours.
More About John W. Young
Robert L. Crippen
Pilot
Robert L. Crippen was chosen as a NASA astronaut in September 1969. A four flight veteran, Crippen has logged over 565 hours in space and orbited the Earth 374 times.
More About Robert L. Crippen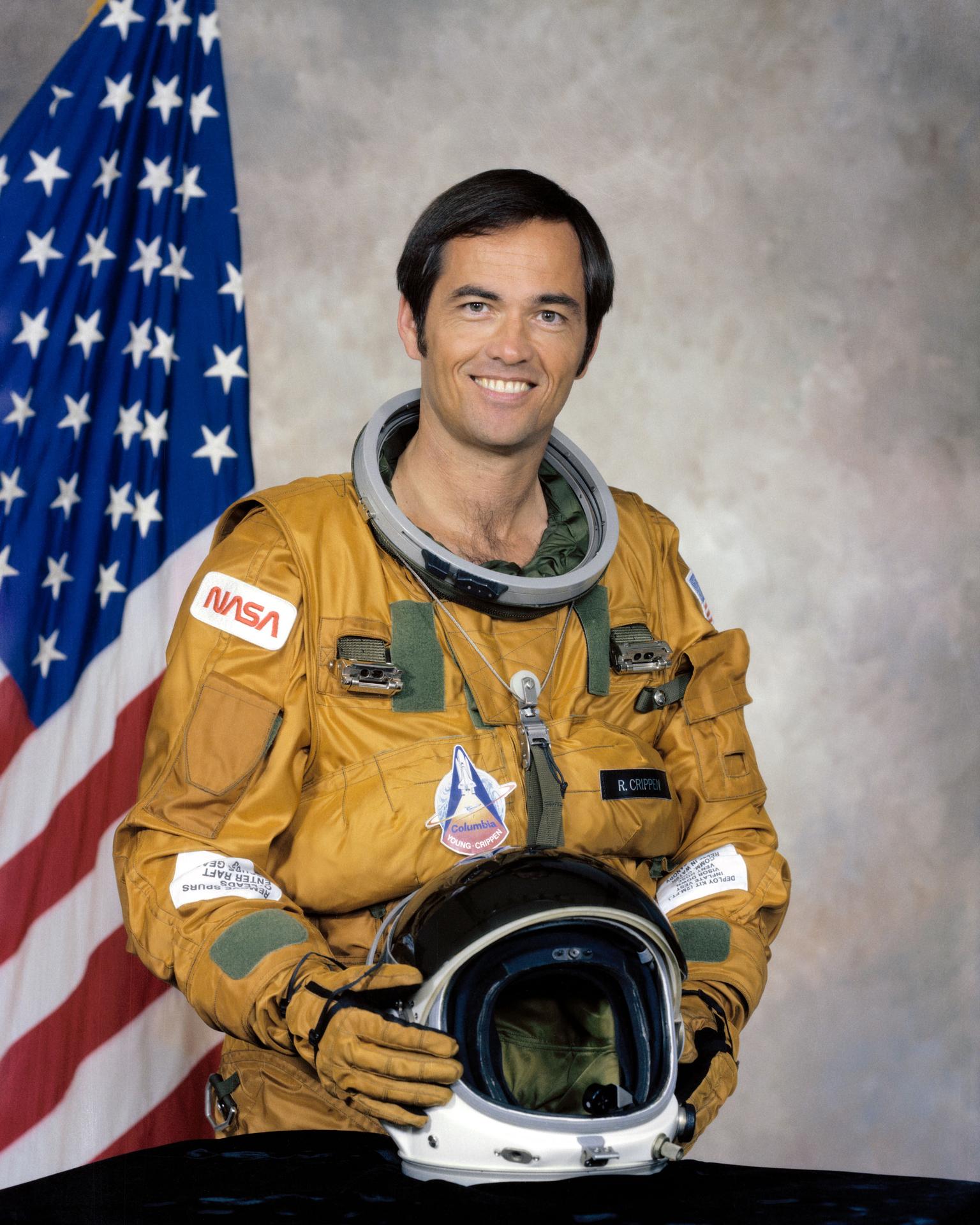
STS-1: Astronaut Bob Crippen Remembers the Ride of His Life
By Linda HerridgeNASA’s John F. Kennedy Space Center Forty years ago, on April 12, 1981, NASA’s Space Shuttle Columbia, attached…
Read the Story


Learn More about STS-1




40 Years Ago: The Countdown Begins for STS-1; First Launch Attempt Scrubbed

40 Years Ago: The Launch of STS-1 Just Two Weeks Away

40 Years Ago: Three Weeks Before Launch, the STS-1 Crew Completes a…

40 Years Ago: One Month to the Launch of STS-1, the First…